В Automated Driving Toolbox™ можно получить высокочастотные данные о датчике из виртуальной среды. Эта среда представляется с помощью Нереального Engine® от Epic Games®.
Таблица суммирует блоки датчика, которые можно симулировать в этой среде.
| Блок датчика | Описание | Визуализация | Пример |
|---|---|---|---|
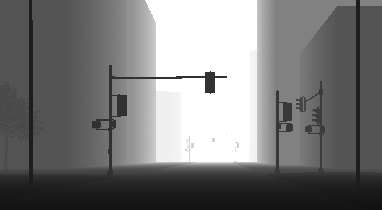
| Отобразите изображения камеры при помощи блока Video Viewer (Computer Vision Toolbox) или To Video Display (Computer Vision Toolbox). Демонстрационная визуализация:
| Спроектируйте детектор маркера маршрута Используя нереальную среду симуляции Engine | |
Отобразите карты глубины при помощи блока Video Viewer (Computer Vision Toolbox) или To Video Display (Computer Vision Toolbox). Демонстрационная визуализация:
| Глубина и визуализация Семантической Сегментации Используя нереальную симуляцию Engine | ||
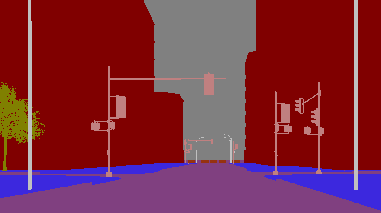
Отобразите карты семантической сегментации при помощи блока Video Viewer (Computer Vision Toolbox) или To Video Display (Computer Vision Toolbox). Демонстрационная визуализация:
| Глубина и визуализация Семантической Сегментации Используя нереальную симуляцию Engine | ||
| Отобразите изображения камеры при помощи блока Video Viewer (Computer Vision Toolbox) или To Video Display (Computer Vision Toolbox). Демонстрационная визуализация:
| Симулируйте простой ведущий сценарий и датчик в нереальной среде Engine | |
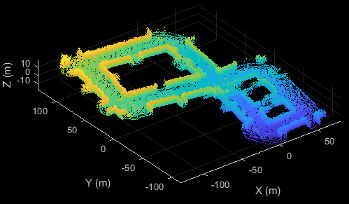
| Отобразите данные об облаке точек при помощи
| Лидар проекта алгоритм SLAM Используя нереальную среду симуляции Engine | |
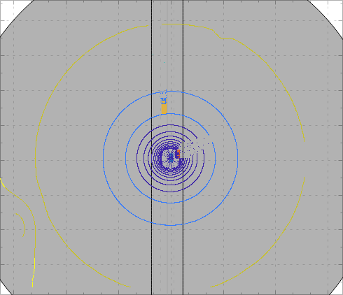
Отобразите зоны охвата лидара и обнаружения при помощи Bird's-Eye Scope. Демонстрационная визуализация:
| Визуализируйте данные о датчике из нереальной среды симуляции Engine | ||
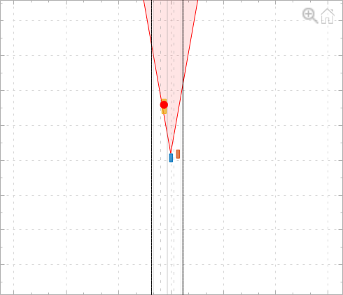
| Отобразите радарные зоны охвата и обнаружения при помощи Bird's-Eye Scope. Демонстрационная визуализация:
| Симулируйте датчики видения и радара в нереальной среде Engine Визуализируйте данные о датчике из нереальной среды симуляции Engine | |
| Simulation 3D Vision Detection Generator |
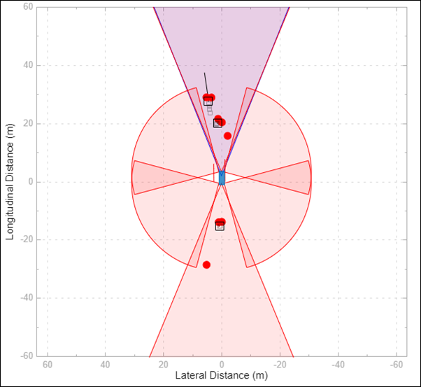
| Отобразите зоны охвата видения и обнаружения при помощи Bird's-Eye Scope. Демонстрационная визуализация:
| Симулируйте датчики видения и радара в нереальной среде Engine |