Обнаружьте объекты и маршруты от измерений в 3D среде симуляции
Automated Driving Toolbox / 3D Симуляция
Блок Simulation 3D Vision Detection Generator генерирует обнаружения от измерений камеры, проведенных датчиком видения, смонтированным на автомобиле, оборудованном датчиком в 3D среде симуляции. Эта среда представляется с помощью Нереального Engine® от Epic Games®. Блок выводит обнаружения из симулированных положений агента, которые основаны на кубоиде представления, (имеющие форму поля) агентов в сценарии. Для получения дополнительной информации см. Алгоритмы.
Блок генерирует обнаружения, с промежутками равняются интервалу обновления датчика. На обнаружения ссылаются к системе координат датчика. Блок может симулировать действительные обнаружения, которые добавили случайный шум и также генерируют ложные положительные обнаружения. Статистическая модель генерирует шум измерения, истинные обнаружения и ложные положительные стороны. Чтобы управлять случайными числами, которые генерирует статистическая модель, используйте настройки генератора случайных чисел на вкладке Measurements блока.
Если вы устанавливаете Sample time на -1, блок использует шаг расчета, заданный в блоке Simulation 3D Scene Configuration. Чтобы использовать этот датчик, необходимо включать блок Simulation 3D Scene Configuration в модель.
Примечание
Блок Simulation 3D Scene Configuration должен выполниться перед блоком Simulation 3D Vision Detection Generator. Тем путем Нереальный Engine, 3D среда визуализации готовит данные перед блоком Simulation 3D Vision Detection Generator, получает его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Vision Detection Generator — 1
Для получения дополнительной информации о порядке выполнения, смотрите Как Нереальная Симуляция Engine для Автоматизированных Ведущих работ.
Sensor identifier — Уникальный идентификатор датчикаУникальный идентификатор датчика в виде положительного целого числа. В системе мультидатчика идентификатор датчика различает датчики. Когда вы добавляете новый блок датчика в свою модель, Sensor identifier того блока является N + 1. N является самым высоким значением Sensor identifier среди существующих блоков датчика в модели.
Пример 2
Parent name — Имя родительского элемента, к которому смонтирован датчикScene Origin (значение по умолчанию) | имя транспортного средстваИмя родительского элемента, к которому датчик смонтирован в виде Scene Origin или как имя транспортного средства в вашей модели. Имена транспортного средства, которые можно выбрать, соответствуют параметрам Name блоков Simulation 3D Vehicle with Ground Following в модели. Если вы выбираете Scene Origin, блок помещает датчик в начале координат сцены.
Пример: SimulinkVehicle1
Mounting location — Местоположение монтирования датчикаOrigin (значение по умолчанию) | Front bumper | Rear bumper | Right mirror | Left mirror | Rearview mirror | Hood center | Roof centerМестоположение монтирования датчика.
Когда Parent name является Scene Origin, подставки под клише датчик до начала координат сцены. Можно установить Mounting location на Origin только. В процессе моделирования датчик остается стационарным.
Когда Parent name является именем транспортного средства (например, SimulinkVehicle1) подставки под клише датчик к одному из предопределенных местоположений монтирования описаны в таблице. В процессе моделирования датчик перемещается с транспортным средством.
| Местоположение монтирования транспортного средства | Описание | Ориентация относительно источника транспортного средства [список, подача, отклонение от курса] (градус) |
|---|---|---|
Origin | Датчик по ходу движения смонтировался к источнику транспортного средства, который находится на земле в геометрическом центре транспортного средства (см. Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox),
| [0, 0, 0] |
Front bumper | Датчик по ходу движения смонтирован к переднему бамперу
| [0, 0, 0] |
Rear bumper | Назад стоящий датчик смонтирован к заднему бамперу
| [0, 0, 180] |
Right mirror | Вниз стоящий датчик смонтирован к правильному зеркалу вида сбоку
| [0, –90, 0] |
Left mirror | Вниз стоящий датчик смонтирован к левому зеркалу вида сбоку
| [0, –90, 0] |
Rearview mirror | Датчик по ходу движения смонтирован к зеркалу заднего обзора в транспортном средстве
| [0, 0, 0] |
Hood center | Датчик по ходу движения, смонтированный к центру капота
| [0, 0, 0] |
Roof center | Датчик по ходу движения, смонтированный к центру крыши
| [0, 0, 0] |
Прокрутитесь, сделайте подачу, и отклонение от курса по часовой стрелке положительно при взгляде в положительном направлении Оси X, Оси Y и оси Z, соответственно. При рассмотрении транспортного средства от верхней части вниз, угол отклонения от курса (то есть, угол ориентации) против часовой стрелки положительны, потому что вы смотрите в обратном направлении оси.
(X, Y, Z) монтирующееся местоположение датчика относительно транспортного средства зависит от типа транспортного средства. Чтобы задать тип транспортного средства, используйте параметр Type блока Simulation 3D Vehicle with Ground Following, с которым вы монтируете датчик. Получить (X, Y, Z) монтирующиеся местоположения для типа транспортного средства, смотрите страницу с описанием для того транспортного средства.
Чтобы определить местоположение датчика в мировых координатах, откройте блок датчика. Затем на вкладке Ground Truth выберите Output location (m) and orientation (rad) и смотрите данные из выходного порта Location.
Specify offset — Задайте смещение от монтирующегося местоположенияoff (значение по умолчанию) | onВыберите этот параметр, чтобы задать смещение от монтирующегося местоположения при помощи параметров Relative rotation [Roll, Pitch, Yaw] (deg) и Relative translation [X, Y, Z] (m).
Relative translation [X, Y, Z] (m) — Перевод возмещен относительно монтирующегося местоположенияСмещение перевода относительно монтирующегося местоположения датчика в виде с действительным знаком 1 3 вектор из формы [X, Y, Z]. Модули исчисляются в метрах.
Если вы монтируете датчик к транспортному средству установкой Parent name к имени того транспортного средства, то X, Y, и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает слева от транспортного средства, как просматривается при взгляде в прямом направлении транспортного средства.
Ось Z подчеркивает.
Источник является монтирующимся местоположением, заданным в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены установкой Parent name к Scene Origin, затем X, Y, и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и системах мировой координаты, смотрите Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox.
Пример: [0,0,0.01]
Чтобы включить этот параметр, выберите Specify offset.
Relative rotation [Roll, Pitch, Yaw] (deg) — Вращательное смещение относительно монтирующегося местоположенияВращательное смещение относительно монтирующегося местоположения датчика в виде с действительным знаком 1 3 вектор из формы [Список, Подача, Отклонение от курса]. Прокрутитесь, сделайте подачу, и отклонение от курса является углами вращения вокруг X-, Y-и осей Z, соответственно. Модули в градусах.
Если вы монтируете датчик к транспортному средству установкой Parent name к имени того транспортного средства, то X, Y, и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает слева от транспортного средства, как просматривается при взгляде в прямом направлении транспортного средства.
Ось Z подчеркивает.
Прокрутитесь, сделайте подачу, и отклонение от курса по часовой стрелке положительно при взгляде в прямом направлении Оси X, Оси Y и оси Z, соответственно. Если вы просматриваете сцену из 2D нисходящей перспективы, то угол отклонения от курса (также названный углом ориентации) против часовой стрелки положителен, потому что вы просматриваете сцену в обратном направлении оси Z.
Источник является монтирующимся местоположением, заданным в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены установкой Parent name к Scene Origin, затем X, Y, и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и системах мировой координаты, смотрите Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox.
Пример: [0,0,10]
Чтобы включить этот параметр, выберите Specify offset.
Sample time Размер шагаШаг расчета блока в секундах в виде положительной скалярной величины. 3D частота кадров среды симуляции является инверсией шага расчета.
Если вы устанавливаете шаг расчета на -1, блок наследовал свой шаг расчета от блока Simulation 3D Scene Configuration.
Types of detections generated by sensor — Типы обнаружений сгенерированы датчикомLanes and objects (значение по умолчанию) | Objects only | Lanes only | Lanes with occlusionТипы обнаружений, сгенерированных датчиком в виде одной из этих опций:
Lanes and objects — Обнаружьте маршруты и объекты. Никакая дорожная информация не используется, чтобы закрыть агентов.
Objects only — Обнаружьте объекты только.
Lanes only — Маршруты обнаружения только.
Lanes with occlusion — Обнаружьте маршрут и объекты. Объекты в поле зрения камеры могут повредить способность датчика обнаружить маршруты.
Maximum number of reported detections — Максимальное количество обнаружений, о которых сообщают,Максимальное количество обнаружений, о которых сообщает датчик в виде положительного целого числа. Об обнаружениях сообщают в порядке увеличивающегося расстояния от датчика, пока максимальное количество не достигнуто.
Пример: 100
Maximum number of reported lanes — Максимальное количество маршрутов, о которых сообщают,Максимальное количество маршрутов, о которых сообщают, в виде положительного целого числа.
Пример: 100
Distance from parent for computing lane boundaries — Расстояния от родительской системы координат, в которой можно вычислить контуры маршрутаРасстояния от родительской системы координат, в которой можно вычислить контуры маршрута в виде N - элемент вектор с действительным знаком. N является количеством значений расстояния. Модули исчисляются в метрах.
parent является системой координат, к которой датчик смонтирован, такие как автомобиль, оборудованный датчиком. Параметр Parent name определяет родительскую систему координат. Расстояния относительно источника родительской системы координат.
При обнаружении маршрутов от камер, расположенных "против движения", задайте отрицательные расстояния. При обнаружении маршрутов от обращенных к передней стороне камер задайте положительные расстояния.
По умолчанию блок вычисляет контур маршрута каждые 0,5 метра по диапазону от 0 до 9,5 метров перед родительским элементом.
Пример: 1:0.1:10 вычисляет контур маршрута каждый 0,1 метра по диапазону от 1 до 10 метров перед родительским элементом.
Source of object bus name — Источник объектного имени шиныAuto (значение по умолчанию) | PropertyИсточник объектной шины называет в виде Auto или Property. Если вы выбираете Auto, блок создает имя шины. Если вы выбираете Property, задайте имя шины при помощи параметра Object bus name.
Object bus name — Объектное имя шиныBusObjectDetections | допустимое имя шиныОбъектное имя шины в виде допустимого имени шины.
Чтобы включить этот параметр, установите параметр Source of object bus name на Property.
Source of output lane bus name — Источник выходного маршрута соединяет шиной имяAuto (значение по умолчанию) | PropertyИсточник выходного маршрута соединяет шиной имя в виде Auto или Property. Если вы выбираете Auto, блок создает имя шины. Если вы выбираете Property, задайте имя шины при помощи параметра Specify an output lane bus name.
Specify an output lane bus name — Имя шины маршрутаBusLaneDetections (значение по умолчанию) | допустимое имя шиныШина маршрута называет в виде допустимого имени шины.
Чтобы включить этот параметр, установите параметр Source of output lane bus name на Property.
Maximum detection range (m) — Максимальная область значений обнаруженияМаксимальная область значений обнаружения в виде положительного действительного скаляра. Датчик видения не может обнаружить объекты вне этой области значений. Модули исчисляются в метрах.
Пример: 250
Bounding box accuracy (pixels) — Точность ограничительной рамкиТочность ограничительной рамки в виде положительного действительного скаляра. Это количество задает точность, которой детектор может совпадать с ограничительной рамкой к цели. Модули находятся в пикселях.
Пример 9
Smoothing filter noise intensity (m/s^2) — Шумовая интенсивность используется для фильтрации скоростные измерения и положениеШумовая интенсивность используется для фильтрации положения и скоростных измерений в виде положительного действительного скаляра. Шумовая интенсивность задает стандартное отклонение шума процесса внутреннего Фильтра Калмана постоянной скорости, используемого в датчике видения. Фильтр моделирует шум процесса при помощи кусочно-постоянной белой шумовой ускоряющей модели. Шумовая интенсивность обычно имеет порядок максимальной ускоряющей величины, ожидаемой для цели. Модули исчисляются в метрах в секунду в квадрате.
Пример 2
Maximum detectable object speed (m/s) — Максимальная обнаруживаемая объектная скоростьМаксимальная обнаруживаемая объектная скорость в виде неотрицательного действительного скаляра. Модули исчисляются в метрах в секунду.
Пример: 20
Maximum allowed occlusion for detector — Максимальное позволенное поглощение газов объектаМаксимальное позволенное поглощение газов объекта в виде действительного скаляра в области значений [0 1). Occlusion является частью общей площади поверхности объекта, который не отображается к датчику. Значение 1 указывает, что объект полностью закрывается. Модули являются безразмерными.
Пример: 0.2
Minimum detectable image size of an object (pixels) — Минимальная высота и ширина объектаМинимальная высота и ширина объекта, который датчик видения обнаруживает в изображении в виде [minHeight,minWidth] вектор из положительных значений. 2D спроектированная высота объекта должна быть больше или быть равна minHeight. Спроектированная ширина объекта должна быть больше или быть равна minWidth. Модули находятся в пикселях.
Пример: [25 20]
Probability of detecting a target — Вероятность обнаруженияВероятность обнаружения цели в виде положительного действительного скаляра, меньше чем или равного 1. Это количество задает вероятность, что датчик обнаруживает обнаруживаемый объект. detectable object является объектом, который удовлетворяет минимальному обнаруживаемому размеру, максимальной области значений, максимальной скорости и максимальным позволенным ограничениям поглощения газов.
Пример: 0.95
Number of false positives per image — Количество ложных обнаружений сгенерировано датчиком видения на изображениеКоличество ложных обнаружений сгенерировано датчиком видения на изображение в виде неотрицательного действительного скаляра.
Пример: 1.0
Minimum lane size in image (pixels) — Максимальный размер маршрутаМинимальный размер спроектированной маркировки маршрута в изображении камеры, что датчик может обнаружить после составления искривления в виде 1 2 вектора с действительным знаком из формы [minHeight, minWidth]. Маркировки маршрута должны превысить оба из этих значений, которые будут обнаружены. Модули находятся в пикселях.
Accuracy of lane boundary (pixels) — Точность контура маршрутаТочность контуров маршрута в виде положительного действительного скаляра. Этот параметр задает точность, с которой датчик маршрута может поместить контур маршрута. Модули находятся в пикселях.
Пример: 2.5
Add noise to measurements — Позвольте добавить шум в измерения датчика виденияon (значение по умолчанию) | offВыберите этот параметр, чтобы добавить шум в измерения датчика видения. В противном случае измерения бесшумны. MeasurementNoise свойство каждого обнаружения всегда вычисляется и не затронуто значением, которое вы задаете для параметра Add noise to measurements.
Select method to specify initial seed — Метод, чтобы задать seed генератора случайных чиселRepeatable (значение по умолчанию) | Specify seed | Not repeatableМетод, чтобы установить seed генератора случайных чисел в виде одной из опций в таблице.
| Опция | Описание |
|---|---|
Repeatable | Блок генерирует случайный начальный seed для первой симуляции и снова использует этот seed для всех последующих симуляций. Выберите этот параметр, чтобы сгенерировать повторяемые результаты статистической модели датчика. Изменить этот начальный seed, в командной строке MATLAB, введите: |
Specify seed | Задайте свой собственный случайный начальный seed для восстанавливаемых результатов при помощи параметра Initial seed. |
Not repeatable | Блок генерирует новый случайный начальный seed после каждой запущенной симуляции. Выберите этот параметр, чтобы сгенерировать неповторяемые результаты статистической модели датчика. |
Initial seed — Seed генератора случайных чиселSeed генератора случайных чисел в виде неотрицательного целого числа меньше чем 232.
Пример: 2001
Чтобы включить этот параметр, установите параметр Select method to specify initial seed на Specify seed.
Focal length (pixels) — Фокусное расстояние камерыФокусное расстояние камеры, в пикселях в виде двухэлементного вектора с действительным знаком. См. также FocalLength Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: [480,320]
Optical center (pixels) — Оптический центр камерыОптический центр камеры, в пикселях в виде двухэлементного вектора с действительным знаком. См. также PrincipalPoint Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: [480,320]
Image size (pixels) — Размер изображения производится камеройРазмер изображения производится камерой в пикселях в виде двухэлементного вектора из положительных целых чисел. См. также ImageSize Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: [240,320]
Radial distortion coefficients — Радиальные коэффициенты искаженияРадиальные коэффициенты искажения в виде двухэлементного или трехэлементного вектора с действительным знаком. Для получения дополнительной информации при установке этих коэффициентов, смотрите RadialDistortion Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: [1,1]
Tangential distortion coefficients — Тангенциальные коэффициенты искаженияТангенциальные коэффициенты искажения в виде двухэлементного вектора с действительным знаком. Для получения дополнительной информации при установке этих коэффициентов, смотрите TangentialDistortion Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: [1,1]
Skew of the camera axes — Скошенный угол осей камерыСкошенный угол осей камеры в виде действительного скаляра. См. также Skew Свойство (Computer Vision Toolbox) cameraIntrinsics.
Пример: 0.1
Output actor truth — Выведите основную истину агентовoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести основную истину агентов на выходном порте Actor Truth.
Output lane truth — Выведите основную истину контуров маршрутаoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести основную истину контуров маршрута на выходном порте Lane Truth.
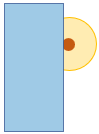
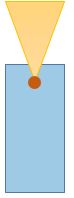
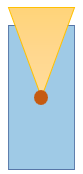
Датчик не может обнаружить маршруты и объекты от точек наблюдения, слишком близких к земле. После монтирования датчика блокируются к транспортному средству при помощи параметра Parent name, установленного параметр Mounting location на одно из предопределенных местоположений монтирования на транспортном средстве.
Если вы оставляете набор Mounting location Origin, который монтирует датчик на земле ниже центра транспортного средства, затем задайте смещение, которое составляет по крайней мере 0,1 метра над землей. Выберите Specify offset, и в параметре Relative translation [X, Y, Z] (m), установите значение Z, по крайней мере, 0.1.
Чтобы визуализировать обнаружения и зоны охвата датчика, используйте Bird's-Eye Scope. Смотрите Визуализируют Данные о Датчике из Нереальной Среды симуляции Engine.
Поскольку Нереальный Engine может занять много времени, чтобы запуститься между симуляциями, рассмотреть логгирование сигналов, что датчики выводят. Смотрите Конфигурируют Сигнал для Логгирования (Simulink).
Чтобы сгенерировать обнаружения, блок Simulation 3D Vision Detection Generator питает агента и достоверные данные маршрута, который читается от Нереальной среды симуляции Engine до блока Vision Detection Generator. Этот блок возвращает обнаружения, которые основаны на кубоиде, или, имеющий форму поля, представления агентов. Физические размерности обнаруженных агентов не основаны на своих размерностях в Нереальной среде Engine. Вместо этого они основаны на наборе значений по умолчанию во вкладке параметра Actor Profiles блока Vision Detection Generator, где все агенты являются приблизительно размером седана. Если вы возвращаете обнаружения, которые имеют поглощения газов, то поглощения газов основаны на всех агентах, являющихся этого размера.
visionDetectionGenerator | cameraIntrinsics (Computer Vision Toolbox)