Приложение Driving Scenario Designer обеспечивает библиотеку предварительно созданных сценариев, представляющих общие ведущие маневры. Приложение также включает сценарии, представляющие европейскую Новую Автомобильную Программу Оценки (Euro NCAP®) тестовые протоколы и версии кубоида предварительно созданных сцен, используемых в 3D среде симуляции.
Чтобы начать, откройте приложение Driving Scenario Designer. В командной строке MATLAB® введите drivingScenarioDesigner.
В приложении предварительно созданные сценарии хранятся как MAT-файлы и организованный в папки. Чтобы открыть предварительно созданный файл сценария, от панели инструментов приложения, выбирают Open> Prebuilt Scenario. Затем выберите предварительно созданный сценарий из одной из папок.
Эти сценарии представляют Евро тестовые протоколы NCAP. Приложение включает сценарии для тестирования автономного экстренного торможения, хранения аварийной полосы, и маршрут сохраняет, помогают системам. Для получения дополнительной информации смотрите Евро NCAP Управление Сценариями в Driving Scenario Designer.
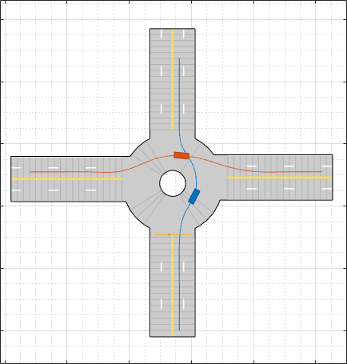
Эти сценарии включают общие шаблоны трафика на пересечениях с четырьмя путями и кольцах.
| FileName | Описание |
|---|---|
EgoVehicleGoesStraight_BicycleFromLeftGoesStraight_Collision.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Велосипед, прибывающий из левой стороны пересечения, идет прямо и сталкивается с автомобилем, оборудованным датчиком.
|
EgoVehicleGoesStraight_PedestrianToRightGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Пешеход в маршруте справа от автомобиля, оборудованного датчиком также перемещается на север и идет сквозной пересечение.
|
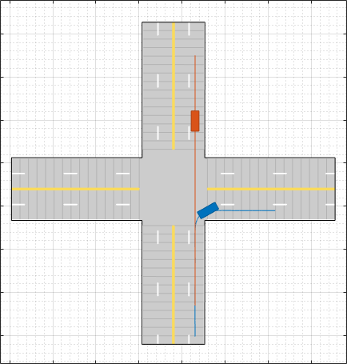
EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство, прибывающее из левой стороны пересечения также, идет прямо. Автомобиль, оборудованный датчиком пересекается перед другим транспортным средством.
|
EgoVehicleGoesStraight_VehicleFromRightGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство, прибывающее из правой стороны пересечения также, идет прямо и пересекается через пересечение сначала.
|
Roundabout.mat | Автомобиль, оборудованный датчиком перемещается на север и кресты путь пешехода при вводе кольца. Автомобиль, оборудованный датчиком затем пересекает путь другого транспортного средства, когда оба транспортных средства проезжают кольцо.
|
Эти сценарии являются версиями кубоида нескольких из предварительно созданных сцен, доступных в 3D среде симуляции. Можно добавить транспортные средства и траектории к этим сценариям. Затем можно включать эти транспортные средства и траектории в модели Simulink®, чтобы симулировать их в 3D среде. Эта среда представляется с помощью Нереального Engine® от Epic Games®. Для получения дополнительной информации об этих сценариях смотрите Версии Кубоида 3D Сцен Симуляции в Driving Scenario Designer.
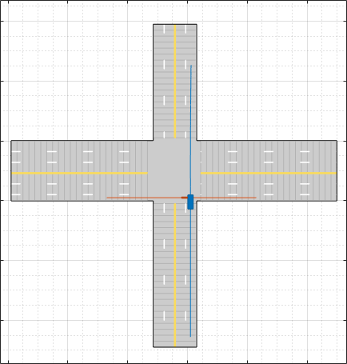
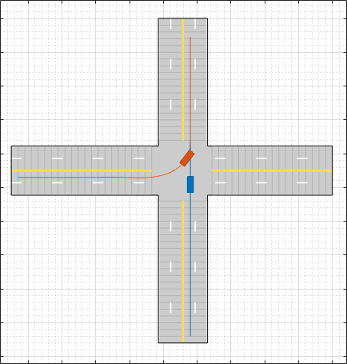
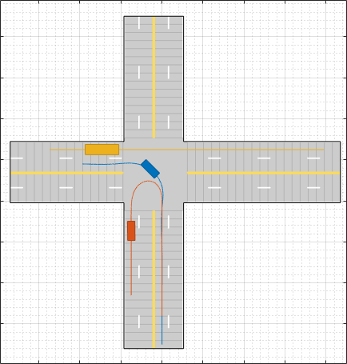
Эти сценарии включают повороты на пересечениях с четырьмя путями.
| FileName | Описание |
|---|---|
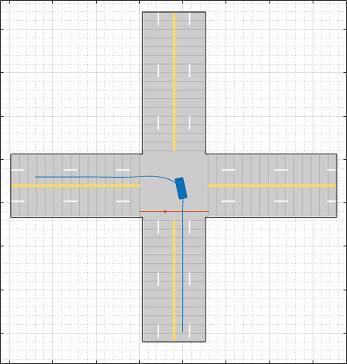
EgoVehicleGoesStraight_VehicleFromLeftTurnsLeft.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство, прибывающее из левой стороны пересечения, поворачивает налево и заканчивается перед автомобилем, оборудованным датчиком.
|
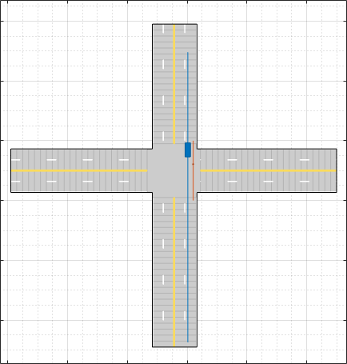
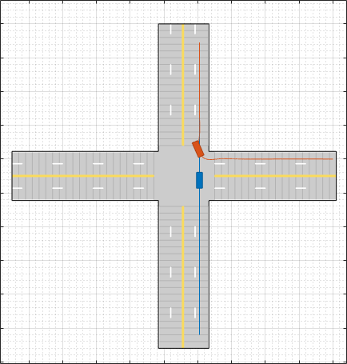
EgoVehicleGoesStraight_VehicleFromRightTurnsRight.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство, прибывающее из правой стороны пересечения, поворачивает направо и заканчивается перед автомобилем, оборудованным датчиком.
|
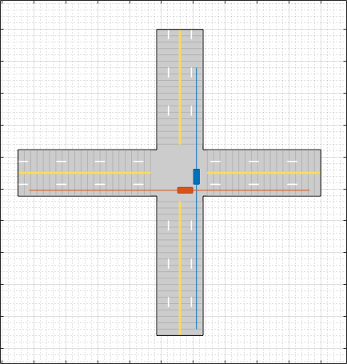
EgoVehicleGoesStraight_VehicleInFrontTurnsLeft.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство перед автомобилем, оборудованным датчиком поворачивает налево на пересечении.
|
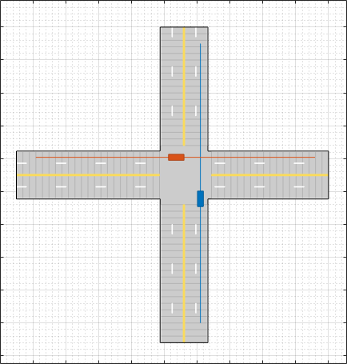
EgoVehicleGoesStraight_VehicleInFrontTurnsRight.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство перед автомобилем, оборудованным датчиком поворачивает направо на пересечении.
|
EgoVehicleTurnsLeft_PedestrianFromLeftGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает налево на пересечении. Пешеход, происходящий из левой стороны пересечения, идет прямо. Автомобиль, оборудованный датчиком завершает свою очередь, прежде чем пешеход закончит пересекать пересечение.
|
EgoVehicleTurnsLeft_PedestrianInOppLaneGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает налево на пересечении. Пешеход в противоположном маршруте идет сквозной пересечение. Автомобиль, оборудованный датчиком завершает свою очередь, прежде чем пешеход закончит пересекать пересечение.
|
EgoVehicleTurnsLeft_VehicleInFrontGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает налево на пересечении. Транспортное средство перед автомобилем, оборудованным датчиком идет сквозное пересечение.
|
EgoVehicleTurnsRight_VehicleInFrontGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает направо на пересечении. Транспортное средство перед автомобилем, оборудованным датчиком идет сквозное пересечение.
|
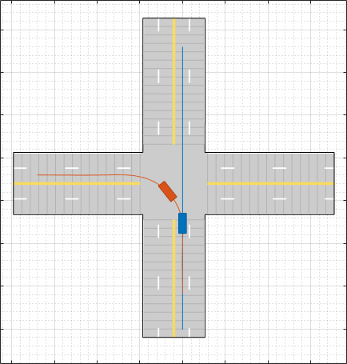
Эти сценарии включают развороты на пересечениях с четырьмя путями.
| FileName | Описание |
|---|---|
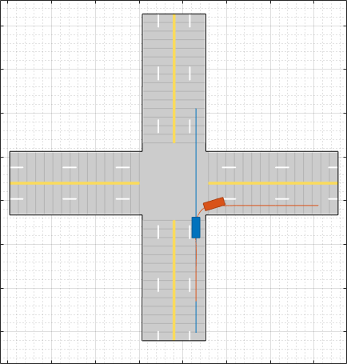
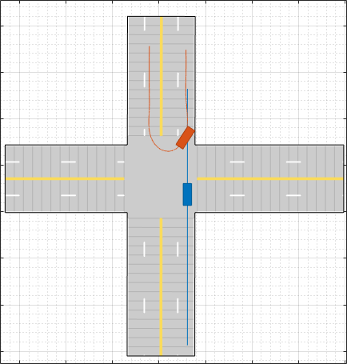
EgoVehicleGoesStraight_VehicleInOppLaneMakesUTurn.mat | Автомобиль, оборудованный датчиком перемещается на север и идет сквозной пересечение. Транспортное средство в противоположном маршруте делает разворот. Автомобиль, оборудованный датчиком заканчивается позади транспортного средства.
|
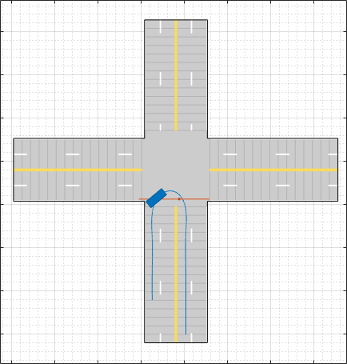
EgoVehicleMakesUTurn_PedestrianFromRightGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и делает разворот на пересечении. Пешеход, происходящий из правой стороны пересечения, идет прямо и пересекает путь разворота.
|
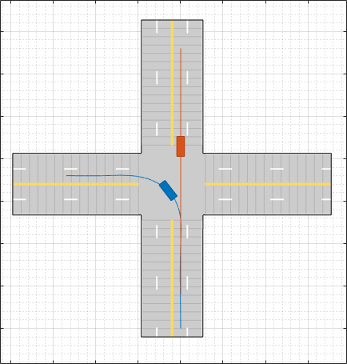
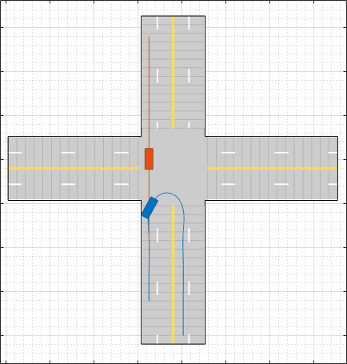
EgoVehicleMakesUTurn_VehicleInOppLaneGoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и делает разворот на пересечении. Транспортное средство, перемещаясь на юг в противоположном направлении идет прямо и заканчивается позади автомобиля, оборудованного датчиком.
|
EgoVehicleTurnsLeft_Vehicle1MakesUTurn_Vehicle2GoesStraight.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает налево на пересечении. Транспортное средство перед автомобилем, оборудованным датчиком делает разворот на пересечении. Второе транспортное средство, грузовик, прибывает из правой стороны пересечения. Автомобиль, оборудованный датчиком заканчивается в маршруте рядом с грузовиком.
|
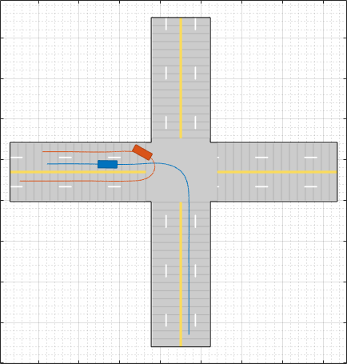
EgoVehicleTurnsLeft_VehicleFromLeftMakesUTurn.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает налево на пересечении. Транспортное средство, прибывающее из левой стороны пересечения, делает разворот. Автомобиль, оборудованный датчиком заканчивается в маршруте рядом с другим транспортным средством.
|
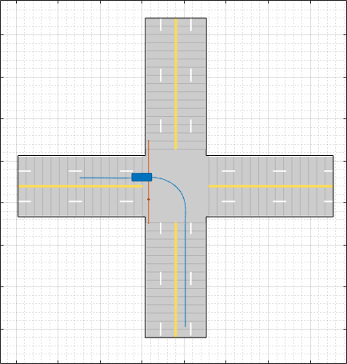
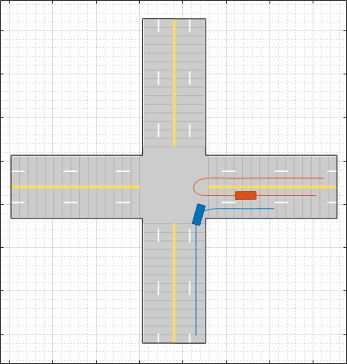
EgoVehicleTurnsRight_VehicleFromRightMakesUTurn.mat | Автомобиль, оборудованный датчиком перемещается на север и поворачивает направо на пересечении. Транспортное средство, прибывающее из правой стороны пересечения, делает разворот. Автомобиль, оборудованный датчиком заканчивается позади транспортного средства в смежном маршруте.
|
После того, как вы выберете сценарий, можно изменить параметры дорог и агентов. Например, от вкладки Actors слева, можно сменить положение или скорость автомобиля, оборудованного датчиком или других агентов. От вкладки Roads можно изменить ширину маршрутов или тип маркировок маршрута.
Можно также добавить или изменить датчики. Например, от вкладки Sensors, можно изменить параметры обнаружения или положения датчиков. По умолчанию, в Евро сценарии NCAP, автомобиль, оборудованный датчиком не содержит датчики. Все другие предварительно созданные сценарии имеют по крайней мере один обращенный к передней стороне датчик камеры или радара, устанавливают, чтобы обнаружить маршруты и объекты.
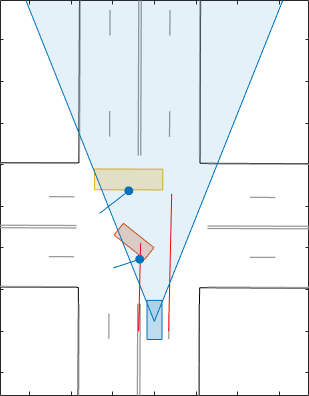
Чтобы сгенерировать обнаружения от датчиков, на панели инструментов приложения, нажимают Run. Когда сценарий запускается, Ego-Centric View отображает сценарий с точки зрения автомобиля, оборудованного датчиком. Bird’s-Eye Plot отображает обнаружения.
Экспортируйте данные о датчике.
Чтобы экспортировать данные о датчике в рабочее пространство MATLAB, на панели инструментов приложения, выбирают Export> Export Sensor Data. Назовите переменную рабочей области и нажмите OK. Приложение сохраняет данные о датчике, когда структура, содержащая данные о датчике, такие как агент, позирует, обнаружения объектов и обнаружения маршрута на каждом временном шаге.
Чтобы экспортировать функцию MATLAB, которая генерирует сценарий и его данные о датчике, выберите Export> Export MATLAB Function. Эта функция возвращает данные о датчике как структуру, сценарий как drivingScenario объект и модели датчика как visionDetectionGenerator, radarDetectionGenerator, и lidarPointCloudGenerator Системные объекты. Путем изменения этой функции можно создать изменения исходного сценария. Для примера этого процесса смотрите, Создают Ведущие Изменения Сценария Программно.
Поскольку предварительно созданные сценарии только для чтения, сохраняют копию ведущего сценария к новой папке. Чтобы сохранить файл сценария, на панели инструментов приложения, выбирают Save> Scenario File As.
Можно вновь открыть этот файл сценария из приложения. В качестве альтернативы в командной строке MATLAB, можно использовать этот синтаксис.
drivingScenarioDesigner(scenarioFileName)
drivingScenario объект. В командной строке MATLAB используйте этот синтаксис, где scenario имя экспортируемого объекта.drivingScenarioDesigner(scenario)
sensors объект датчика или массив ячеек таких объектов.drivingScenarioDesigner(scenario,sensors)
drivingScenario возразите в свою модель. Этот блок непосредственно не считывает данные о датчике. Чтобы добавить датчики, которые вы создали в приложении к модели Simulink, сгенерируйте модель, содержащую ваш сценарий и датчики путем выбора Export> Export Simulink Model. В модели сгенерированный блок Scenario Reader читает сценарий, и сгенерированные блоки датчика задают датчики.