

Функция измерения для ускоряющей модели движения Зингера
measurements = singermeas(states)measurements в прямоугольных координатах для движения Зингера, основанного на модели на текущем states.
measurements = singermeas(states,frame)frame.
measurements = singermeas(states,frame,sensorpos,sensorvel)sensorpos, и скорость датчика, sensorvel.
measurements = singermeas(states,measurementParameters)measurementParameters.
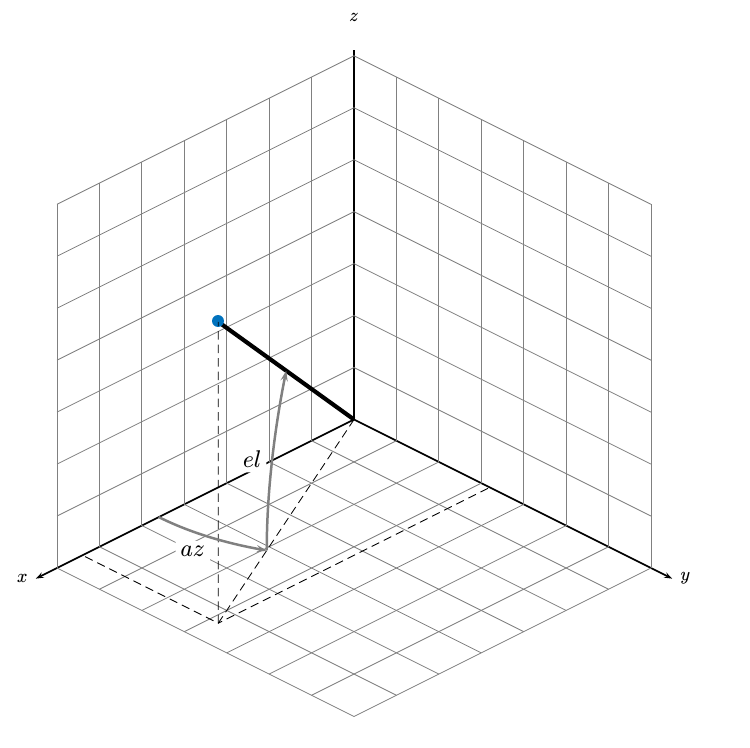
Задайте азимут и углы возвышения, используемые в Sensor Fusion and Tracking Toolbox™.
azimuth angle вектора является углом между x - ось и ее ортогональной проекцией на плоскость xy. Угол положителен в движении от оси x к оси y. Углы азимута находятся между –180 и 180 градусами. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - ось от плоскости xy.
[1] Зингер, Роберт А. "Оценка оптимального отслеживания фильтрует эффективность для укомплектованных целей маневрирования". Транзакции IEEE на Космических и Электронных системах 4 (1970): 473-483.
[2] Блэкмен, Сэмюэль С. и Роберт Пополи. "Проект и анализ современных систем слежения". (1999).
[3] Литий, С. Жун и Весселин П. Жильков. "Обзор маневрирующего целевого отслеживания: динамические модели". Сигнал и Обработка данных Маленьких Целей 2000, издание 4048, стр 212-235. Международное общество Оптики и Фотоники, 2000.
initsingerekf | singer | singerjac | singermeasjac | singerProcessNoise