Оцените модель в пространстве состояний с помощью данных частотного диапазона или временного интервала
sys = ssest(data,nx)sys из порядка nx, использование данных data это может быть во временном интервале или частотном диапазоне. sys модель следующей формы:
A, B, C, D и K являются матрицами пространства состояний. u (t) является входом, y (t) является выход, e (t) является воздействием, и x (t) является вектором из nx состояния.
Все записи A, B, C и K являются свободными допускающими оценку параметрами по умолчанию. D фиксируется, чтобы обнулить по умолчанию, означая, что нет никакого сквозного соединения, за исключением статических систем (nx = 0).
sys = ssest(data,nx,Name,Value)'Ts' аргумент пары "имя-значение". Используйте 'Form', 'Feedthrough', и 'DisturbanceModel' аргументы пары "имя-значение", чтобы изменить поведение по умолчанию A, B, C, D и матриц K.
Оцените модель в пространстве состояний и сравните ее ответ с измеренным выходом.
Загрузите данные ввода - вывода, которые хранятся в iddata объект.
load iddata1 z1
Оцените модель в пространстве состояний четвертого порядка.
nx = 4; sys = ssest(z1,nx);
Сравните симулированный ответ модели с измеренным выходом.
compare(z1,sys)

График показывает, что подходящий процент между симулированной моделью и данными об оценке больше 70%.
Можно просмотреть больше информации об оценке путем исследования idss свойство sys.Report.
sys.Report
ans =
Status: 'Estimated using SSEST with prediction focus'
Method: 'SSEST'
InitialState: 'zero'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1x1 struct]
Parameters: [1x1 struct]
OptionsUsed: [1x1 idoptions.ssest]
RandState: []
DataUsed: [1x1 struct]
Termination: [1x1 struct]
Например, узнайте больше информации об условиях завершения.
sys.Report.Termination
ans = struct with fields:
WhyStop: 'No improvement along the search direction with line search.'
Iterations: 7
FirstOrderOptimality: 85.9759
FcnCount: 123
UpdateNorm: 8.1714
LastImprovement: 0
Отчет включает в себя информацию о количестве итераций и причины, которой оценка прекратила выполнять итерации.
Загрузите данные ввода - вывода z1, который хранится в iddata объект. Это - те же данные, используемые, чтобы оценить модель четвертого порядка в Модели в пространстве состояний.
load iddata1 z1
Определите оптимальный порядок модели путем определения аргумента nx как диапазон от 1:10.
nx = 1:10; sys = ssest(z1,nx);
Автоматически сгенерированный график показывает сингулярные значения Ганкеля для моделей порядков, заданных nx.
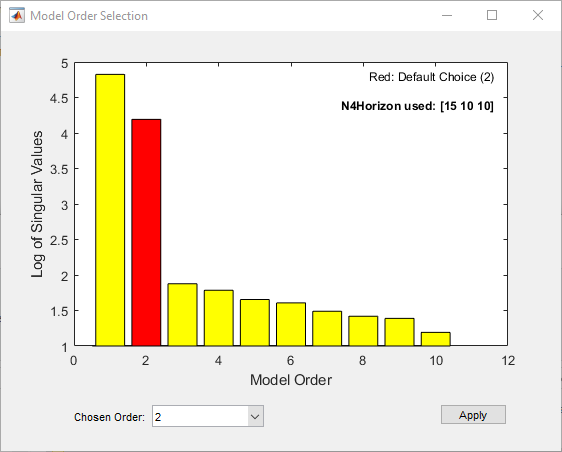
Состояния с относительно маленькими сингулярными значениями Ганкеля могут быть безопасно отброшены. Предложенным выбором порядка по умолчанию является 2.
Выберите порядок модели в Chosen Order, перечисляют и нажимают Apply.
Загрузите данные об отклике системы временного интервала.
load iddata7 z7;
Идентифицируйте модель в пространстве состояний четвертого порядка данных. Задайте известную задержку 2 секунды для первого входа и 0 секунды для второго входа.
nx = 4;
sys = ssest(z7(1:300),nx,'InputDelay',[2;0]);Измените каноническую форму A, B, и матрицы C, включайте проходной термин в матрице D и устраните оценку возмущения матрицу K.
Загрузите данные ввода - вывода и оцените систему четвертого порядка с помощью ssest опции по умолчанию.
load iddata1 z1 sys1 = ssest(z1,4);
Укажите, что компаньон формирует и сравнивает A матрица с A по умолчанию матрица.
sys2 = ssest(z1,4,'Form','companion'); A1 = sys1.A
A1 = 4×4
-0.5155 -3.8483 0.6657 -0.2666
5.8665 -2.7285 1.0649 -1.4694
-0.4487 0.9308 -0.6235 18.8148
-0.4192 0.5595 -16.0688 0.5399
A2 = sys2.A
A2 = 4×4
103 ×
0 0 0 -7.1122
0.0010 0 0 -0.9547
0 0.0010 0 -0.3263
0 0 0.0010 -0.0033
Включайте проходной термин и сравните D матрицы.
sys3 = ssest(z1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0339
Устраните моделирование воздействия и сравните K матрицы.
sys4 = ssest(z1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0520
0.0973
0.0151
0.0270
K4 = sys4.K
K4 = 4×1
0
0
0
0
Задайте ssest оцените начальные состояния как независимые параметры оценки.
ssest может обработать начальные состояния с помощью одного из нескольких методов. По умолчанию, ssest выбирает метод автоматически на основе ваших данных об оценке. Можно выбрать метод сами путем изменения набора опции с помощью ssestOptions.
Загрузите данные ввода - вывода z1 и оцените модель в пространстве состояний второго порядка sys использование опций по умолчанию. Используйте синтаксис, который возвращает начальные состояния x0.
load iddata1 z1 [sys,x0] = ssest(z1,2); x0
x0 = 2×1
0
0
По умолчанию оценка выполняется с помощью 'auto' установка для InitialState. Узнайте который метод ssest примененный путем рассмотрения значения InitialState в sys.Report.
sys.Report.InitialState
ans = 'zero'
Программное обеспечение применило 'zero' метод, означая, что программное обеспечение обнулило начальные состояния вместо того, чтобы оценить их. Этот выбор сопоставим с 0 значения возвращены для x0.
Задайте тот ssest оцените начальные состояния вместо этого как независимые параметры с помощью 'estimate' установка. Используйте ssestOptions создать модифицированный набор опции и указать что набор опции, чтобы оценить новую модель.
opt = ssestOptions('InitialState','estimate'); [sys1,x0] = ssest(z1,2,opt); x0
x0 = 2×1
0.0068
0.0052
x0 теперь оценил параметры с ненулевыми значениями.
Получите упорядоченную модель в пространстве состояний пятого порядка для системы второго порядка от узкого сигнала пропускной способности.
Загрузите данные об оценке.
load regularizationExampleData eData;
Создайте модель передаточной функции, используемую для генерации данных об оценке (истинная система).
trueSys = idtf([0.02008 0.04017 0.02008],[1 -1.561 0.6414],1);
Оцените неупорядоченную модель в пространстве состояний.
opt = ssestOptions('SearchMethod','lm'); m = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
Оцените упорядоченную модель в пространстве состояний.
opt.Regularization.Lambda = 10; mr = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
Сравните выходные параметры модели с данными об оценке.
compare(eData,m,mr);

Сравните импульсные характеристики модели.
impulse(trueSys,m,mr,50); legend('trueSys','m','mr');

Оцените модель в пространстве состояний измеренных данных ввода - вывода. Сконфигурируйте ограничения параметра и начальные значения для оценки с помощью модели в пространстве состояний.
Создайте idss модель, чтобы задать начальную параметризацию для оценки.
A = blkdiag([-0.1 0.4; -0.4 -0.1],[-1 5; -5 -1]); B = [1; zeros(3,1)]; C = [1 1 1 1]; D = 0; K = zeros(4,1); x0 = [0.1 0.1 0.1 0.1]; Ts = 0; init_sys = idss(A,B,C,D,K,x0,Ts);
Установка всех записей K к 0 создает idss модель без элемента воздействия состояния.
Используйте Structure свойство зафиксировать значения некоторых параметров модели. Сконфигурируйте модель так, чтобы B и K фиксируются, и только ненулевые записи A являются допускающими оценку.
init_sys.Structure.A.Free = (A~=0); init_sys.Structure.B.Free = false; init_sys.Structure.K.Free = false;
Записи в init_sys.Structure.A.Free определите ли соответствующие записи в init_sys.A свободны (true) или зафиксированный (false).
Загрузите результаты измерений и оцените модель в пространстве состояний с помощью ограничений параметра и начальных значений, заданных init_sys.
load iddata2 z2; sys = ssest(z2,init_sys);
Предполагаемые параметры sys удовлетворите ограничениям, заданным init_sys.
ssest инициализирует оценки параметра с помощью или неитеративного подхода подпространства или итеративного подхода оценки рациональной функции. Это затем совершенствовало значения параметров с помощью ошибочного подхода минимизации предсказания. Для получения дополнительной информации смотрите pem и ssestOptions.
[1] Ljung, L. System Identification: теория для пользователя, второго выпуска. Верхний Сэддл-Ривер, NJ: PTR Prentice Hall, 1999.
canon | iddata | idfrd | idgrey | idss | n4sid | pem | polyest | procest | ssestOptions | ssregest | tfest