

Пропустите все переменные системы координат из объекта KinematicsSolver
clearFrameVariables( отбрасывания все переменные системы координат из ks)KinematicsSolver объект ks. Структурируйте получение переменных преобразования между любыми двумя данными системами координат. Используйте эту объектную функцию, если ни одна из переменных системы координат не больше релевантна — например, прежде, чем сформулировать новую кинематическую проблему для той же модели мультитела использование других переменных системы координат.
Структурируйте и соединитесь, переменные включают все кинематические переменные в KinematicsSolver объект. Они могут функционировать как цели, чтобы ограничить настройку мультитела, для которой можно решить неизвестные как предположения, чтобы сместить решение к одной из одинаково вероятных альтернатив, когда несколько существуют, и как выходные параметры — неизвестные в анализе.
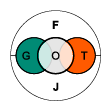
Рисунок показывает переменные общего KinematicsSolver объект. Цель (T), угадайте (G) и выведите переменные (O), может быть объединенные переменные (J) или структурировать переменные (F). Объединенные переменные являются нативными к объекту и могут быть присвоены от его запуска как цели, предположения и выходные параметры. Переменные системы координат должны сначала быть созданы с addFrameVariables.
addFrameVariables | frameVariables | KinematicsSolver | removeFrameVariables