DC Motor
Модель двигателя постоянного тока с электрическим и характеристиками крутящего момента и моделированием отказа
Описание
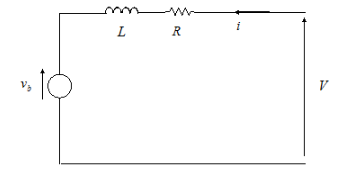
Блок DC Motor представляет электрические характеристики и характеристики крутящего момента двигателя постоянного тока с помощью следующей модели эквивалентной схемы:
Вы задаете параметры эквивалентной схемы для этой модели, когда вы устанавливаете параметр Model parameterization на By equivalent circuit parameters. Резистор R соответствует сопротивлению, которое вы задаете в параметре Armature resistance. Индуктор L соответствует индуктивности, которую вы задаете в параметре Armature inductance.
Можно задать, как сгенерировать магнитное поле двигателя постоянного тока путем установки параметра Field type на желаемую опцию. Постоянные магниты в двигателе вызывают следующий коэффициент противо-ЭДС vb в арматуре:
где kv является Back-emf constant, и ω является скоростью вращения. Двигатель производит следующий крутящий момент, который пропорционален моторному текущему i:
где kt является Torque constant. Блок DC Motor принимает, что нет никаких электромагнитных потерь. Это означает, что механическая энергия равна электроэнергии, рассеянной коэффициентом противо-ЭДС в арматуре. Приравнивание этих двух условий дает:
В результате вы задаете или kv или kt в параметрах блоков.
Если магнитное поле сгенерировано от токов, текущие через обмотки, Back-emf constant зависит от поля текущий If:
где Laf является Field-armature mutual inductance.
Характеристика скорости крутящего момента для блока DC Motor связана с параметрами на предыдущем рисунке. Когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed или By rated power, rated speed & no-load speed, блок решает для параметров эквивалентной схемы можно следующим образом:
Для установившегося отношения скорости крутящего момента L не оказывает влияния.
Суммируйте напряжения вокруг цикла и перестроения для i:
Замените этим значением i в уравнение для крутящего момента:
Когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed, блок использует предыдущее уравнение, чтобы определить значения для R и kt (и эквивалентно kv).
Когда вы устанавливаете параметр Model parameterization на By rated power, rated speed & no-load speed, блок использует расчетную скорость и степень вычислить расчетный крутящий момент. Блок использует расчетный крутящий момент и значения скорости без загрузок в предыдущем уравнении, чтобы определить значения для R и kt.
Инерция двигателя моделей блока J и затухание λ для всех значений параметра Model parameterization. Получившийся крутящий момент через блок:
Не всегда возможно измерить затухание ротора, и затухание ротора не всегда обеспечивается в таблице данных производителя. Альтернатива должна использовать ток без загрузок, чтобы вывести значение для затухания ротора.
Для без загрузок электрически сгенерированный механический крутящий момент должен равняться крутящему моменту затухания ротора:
где i noload является током без загрузок. Если вы выбираете By no-load current для параметра Rotor damping parameterization затем это уравнение используется в дополнение к уравнению скорости крутящего момента, чтобы определить значения для λ и других коэффициентов уравнения.
Значение для затухания ротора, ли заданный непосредственно или в терминах тока без загрузок, учтено при определении параметров эквивалентной схемы для опций Model parameterization By stall torque and no-load speed и By rated power, rated speed and no-load speed.
Когда положительные электрические токи от электрического + до портов -, положительный крутящий момент действует от механического C до портов R.
Отказы
Блок DC Motor позволяет вам моделировать два типа отказов:
Отказ обмотки арматуры — обмотка арматуры перестала работать и идет разомкнутая цепь.
Отказ обмотки возбуждения — обмотка возбуждения, которая создает сбои магнитного поля и идет разомкнутая цепь.
Блок может инициировать события отказа:
В определенное время (временный отказ).
Когда текущий предел превышен для дольше, чем определенный временной интервал (поведенческий отказ).
Можно включить или отключить эти триггерные механизмы отдельно.
Можно выбрать, выпустить ли утверждение, когда отказ происходит, при помощи параметра Reporting when a fault occurs. Утверждение может принять форму предупреждения или ошибки. По умолчанию блок не выпускает утверждение.
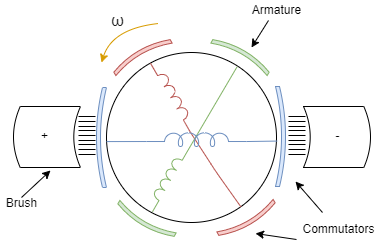
Этот рисунок показывает типовое представление двигателя постоянного тока, с кистями, арматурами, коммутаторами и их обмотками:
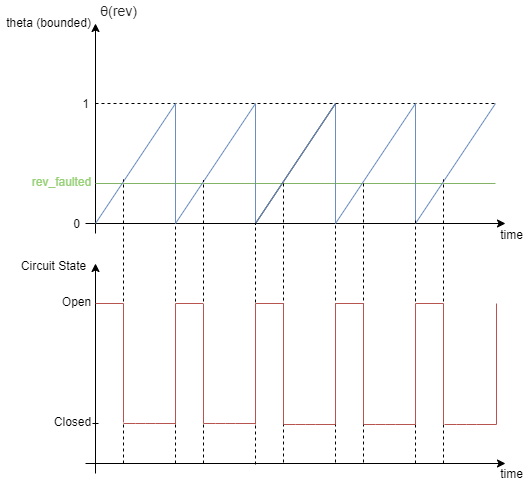
Если вы устанавливаете параметр Enable armature winding open-circuit fault на Yes, сбои арматуры, в то время, когда задано параметром Time at which armature winding fault is triggered для временного отказа, или когда извилистые токи превышает значение параметра Maximum permissible armature winding current для поведенческого отказа. Когда арматура перестала работать, источник напряжения, соединенный с этим блоком, наблюдает разомкнутую цепь для части общего моторного оборота, заданного параметром Fraction of revolution during which armature is open-circuit, rev_faulted. Этот рисунок иллюстрирует поведение состояния схемы для определенного rev_faulted в целый период оборота:
Тепловой порт
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы осушить тепловой порт, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают > > . Это действие отображает тепловой порт H на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence.
Используйте тепловой порт, чтобы симулировать эффекты медных потерь сопротивления, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов и на Temperature Dependence и параметрах Thermal Port, смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Порты
Сохранение
развернуть все
+ — Положительный терминал
электрический
Электрический порт сохранения сопоставил с двигателем постоянного тока положительный терминал.
- — Отрицательный терминал
электрический
Электрический порт сохранения сопоставил с двигателем постоянного тока отрицательный терминал.
C — Моторный случай
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен со случаем двигателя постоянного тока.
R — Моторный ротор
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с ротором двигателя постоянного тока.
F+ — Положительное поле
электрический
Электрический порт сохранения сопоставлен с положительной обмоткой возбуждения.
Зависимости
Чтобы включить этот порт, установите Field type на Wound.
F- — Отрицательное поле
электрический
Электрический порт сохранения сопоставлен с отрицательной обмоткой возбуждения.
Зависимости
Чтобы включить этот порт, установите Field type на Wound.
H — Тепловой порт
тепловой
Тепловой порт. Для получения дополнительной информации смотрите Тепловой Порт.
Параметры
развернуть все
Электрический крутящий момент
Field type — Тип поля
Permanent Magnet (значение по умолчанию) | Wound
Выберите один из следующих методов для типа поля:
Permanent Magnet — Сгенерируйте магнитное поле двигателя постоянного тока с помощью постоянного магнита.
Wound — Сгенерируйте магнитное поле двигателя постоянного тока с помощью токов, текущие через обмотки.
Model parameterization — Блокируйте параметризацию
By equivalent circuit parameters (значение по умолчанию) | By stall torque & no-load speed | By rated power, rated speed & no-load speed
Выберите один из следующих методов для параметризации блока:
By equivalent circuit parameters — Обеспечьте электрические параметры для модели эквивалентной схемы двигателя.
By stall torque & no-load speed — Обеспечьте крутящий момент и параметры скорости, которые блок преобразует в модель эквивалентной схемы двигателя.
By rated power, rated speed & no-load speed — Обеспечьте степень и параметры скорости, которые блок преобразует в модель эквивалентной схемы двигателя.
Зависимости
Чтобы включить этот параметр, установите Field type на Permanent magnet.
Field resistance — Полевое сопротивление
100 Ohm (значение по умолчанию)
Сопротивление магнитного поля.
Зависимости
Чтобы включить этот параметр, установите Field type на Wound.
Field inductance — Полевая индуктивность
1 H (значение по умолчанию)
Индуктивность магнитного поля.
Зависимости
Чтобы включить этот параметр, установите Field type на Wound.
Field-armature mutual inductance — Полевая арматура взаимная индуктивность
0.15 H (значение по умолчанию)
Взаимная индуктивность между магнитным полем и фрагментом проведения двигателя.
Зависимости
Чтобы включить этот параметр, установите Field type на Wound.
Initial field current — Начальное текущее поле
0 A (значение по умолчанию)
Начальное текущее поле.
Зависимости
Чтобы включить этот параметр, установите Field type на Wound.
Armature resistance — Сопротивление якоря
3.9 Ohm (значение по умолчанию)
Сопротивление фрагмента проведения двигателя.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By equivalent circuit parameters.
Armature inductance — Индуктивность якоря
12e-6
H (значение по умолчанию)
Индуктивность фрагмента проведения двигателя. Если у вас нет информации об этой индуктивности, установите значение этого параметра к маленькому, ненулевому номеру.
Define back-emf or torque constant — Спецификация констант
Specify back-emf constant (значение по умолчанию) | Specify torque constant
Укажите, зададите ли вы коэффициент противо-ЭДС, постоянную двигателя или постоянный крутящий момент. Когда вы задаете их в единицах СИ, эти константы имеют то же значение, таким образом, вы только задаете один или другой в диалоговом окне блока.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By equivalent circuit parameters.
Back-emf constant — Коэффициент противо-ЭДС, постоянная
0.072e-3 (значение по умолчанию) | V/rpm
Отношение напряжения, сгенерированного двигателем к скорости, на которой вращается двигатель.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Define back-emf or torque constant на Specify back-emf constant.
Torque constant — Постоянный крутящий момент
6.876e-4
N*m/A (значение по умолчанию)
Отношение крутящего момента, сгенерированного двигателем к току, поставленному ему.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Define back-emf or torque constant на Specify torque constant.
Stall torque — Остановите крутящий момент
0.24e-3
N*m. (значение по умолчанию)
Сумма крутящего момента, сгенерированного двигателем, когда скорость является приблизительно нулем.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed.
No-load speed — Скорость без загрузок
19100 rpm (значение по умолчанию)
Скорость двигателя, если не управляющего загрузкой.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed или By rated power, rated speed & no-load speed.
Rated speed (at rated load) — Расчетная скорость
15000 rpm (значение по умолчанию)
Частота вращения двигателя на расчетном уровне механической энергии.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By rated power, rated speed & no-load speed.
Rated load (mechanical power) — Расчетная загрузка
0.08 W (значение по умолчанию)
Механическая энергия двигатель спроектирована, чтобы поставить на расчетной скорости.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By rated power, rated speed & no-load speed.
Rated DC supply voltage — Расчетное напряжение питания DC
1.5 V (значение по умолчанию)
Напряжение, при котором двигатель оценивается, чтобы действовать.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed или By rated power, rated speed & no-load speed.
Rotor damping parameterization — Параметризация затухания ротора
By damping value (значение по умолчанию) | By no-load current
Выберите один из следующих методов, чтобы задать затухание ротора:
By damping value — Задайте значение для ротора, ослабляющего непосредственно, при помощи параметра Rotor damping в параметрах Mechanical.
By no-load current — Блок вычисляет затухание ротора на основе значений, которые вы задаете для параметров DC supply voltage when measuring no-load current и No-load current. Если вы выбираете эту опцию, параметр Rotor damping не доступен для параметров Mechanical.
No-load current — Ток без загрузок
0 A (значение по умолчанию)
Задайте текущее значение без загрузок, чтобы использоваться для вычисления затухания ротора. Этот параметр только отображается, когда вы выбираете By no-load current для параметра Rotor damping parameterization.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Rotor damping parameterization на By no-load current.
DC supply voltage when measuring no-load current — Напряжение питания DC при измерении тока без загрузок
1.5 V (значение по умолчанию)
Задайте напряжение питания DC, соответствующее текущему значению без загрузок, чтобы использоваться для вычисления затухания ротора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Rotor damping parameterization на By no-load current.
Механическое устройство
Rotor inertia — Инерция ротора
0.01
g*cm^2 (значение по умолчанию)
Сопротивление ротора, чтобы измениться в моторном движении. Значение может быть нулем.
Rotor damping — Ротор рассеял энергию
0 N*m/(rad/s) (значение по умолчанию)
Энергия рассеивается ротором. Значение может быть нулем.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Rotor damping parameterization в установке Electrical Torque к By damping value.
Initial rotor speed — Начальная скорость ротора
0 rpm (значение по умолчанию)
Скорость ротора в начале симуляции.
Температурная зависимость
Эта вкладка появляется только для блоков с осушенным тепловым портом. Для получения дополнительной информации смотрите Тепловой Порт.
Resistance temperature coefficient — Коэффициент температуры сопротивления
3.93e-3
1/K (значение по умолчанию)
Коэффициент температуры сопротивления.
Measurement temperature — Температура измерения
25 degC (значение по умолчанию)
Температура, для которой заданы параметры двигателя.
Тепловой порт
Эта вкладка появляется только для блоков с осушенным тепловым портом. Для получения дополнительной информации смотрите Тепловой Порт.
Thermal mass — Количество тепла
100 J/K (значение по умолчанию)
Количество тепла является энергией, требуемой для повышения температуры на один градус.
Initial temperature — Начальная температура
25 degC (значение по умолчанию)
Температура теплового порта в начале симуляции.
Отказы
Enable armature winding open-circuit fault — Разрешить ли отказы обмотки арматуры
No (значение по умолчанию) | Yes
Выберите Yes включить моделирование отказов и отсоединить связанные параметры в разделе Faults, который позволяет вам выбрать метод создания отчетов и задать время, в которое арматура, проветривающая отказ, инициировала.
Fraction of revolution during which armature is open-circuit — Часть оборота, во время которого арматура является разомкнутой цепью
1/3
Часть оборота двигателя постоянного тока, во время которого обмотка арматуры дана сбой и источник напряжения, наблюдает разомкнутую цепь. Для получения дополнительной информации смотрите раздел Faults.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes.
Faulted armature winding open-circuit conductance — Проводимость разомкнутой цепи неработающей обмотки арматуры
1e-5
S (значение по умолчанию)
Проводимость разомкнутой цепи, когда обмотка арматуры дана сбой.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes.
Armature winding fault trigger — Триггер отказа для обмотки арматуры
Temporal (значение по умолчанию) | Behavioral
Является ли триггер для отказа обмотки арматуры временным или поведенческим.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes.
Time at which armature winding fault is triggered — Время, в которое инициирован отказ обмотки арматуры
1 s (значение по умолчанию)
Время, в которое обмотка арматуры становится неработающей.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes и Armature winding fault trigger к Temporal.
Maximum permissible armature winding current — Максимальная допустимая арматура, вьющаяся текущий
inf
A (значение по умолчанию)
Верхний текущий загрузкой порог для отказов обмотки арматуры разомкнутой цепи.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes и Armature winding fault trigger к Behavioral.
Time to fail when exceeding armature winding current — Время, чтобы перестать работать, когда чрезмерная арматура, вьющаяся текущий
1 s (значение по умолчанию)
Количество времени, что текущая обмотка должна постоянно превышать максимальную допустимую арматуру, вьющуюся текущий перед поведенческим отказом, инициировано.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault на Yes и Armature winding fault trigger к Behavioral.
Enable field winding open-circuit fault — Разрешить ли отказы обмотки возбуждения
No (значение по умолчанию) | Yes
Выберите Yes включить моделирование отказов обмотки возбуждения и отсоединить связанные параметры в разделе Faults, который позволяет вам выбрать метод создания отчетов и задать время, в которое отказ обмотки возбуждения инициировал.
Зависимости
Чтобы включить этот параметр, установите Field type на Wound.
Faulted field winding open-circuit conductance — Проводимость разомкнутой цепи неработающей обмотки возбуждения
1e-5
S (значение по умолчанию)
Проводимость разомкнутой цепи, когда обмотка возбуждения дана сбой.
Зависимости
Чтобы включить этот параметр, установите Enable field winding open-circuit fault на Yes.
Field winding fault trigger — Триггер отказа для обмотки возбуждения
Temporal (значение по умолчанию) | Behavioral
Является ли триггер для отказа обмотки возбуждения временным или поведенческим.
Зависимости
Чтобы включить этот параметр, установите Enable field winding open-circuit fault на Yes.
Time at which field winding fault is triggered — Время, в которое инициирован отказ обмотки возбуждения
1 s (значение по умолчанию)
Время, в которое обмотка возбуждения становится неработающей.
Зависимости
Чтобы включить этот параметр, установите Enable field winding open-circuit fault на Yes и Field winding fault trigger к Temporal.
Maximum permissible field winding current — Максимальная допустимая текущая обмотка возбуждения
inf
A (значение по умолчанию)
Верхний текущий загрузкой порог для отказов обмотки возбуждения разомкнутой цепи.
Зависимости
Чтобы включить этот параметр, установите Enable field winding open-circuit fault на Yes и Field winding fault trigger к Behavioral.
Time to fail when exceeding field winding current — Время, чтобы перестать работать, когда чрезмерная текущая обмотка возбуждения
1 s (значение по умолчанию)
Количество времени, что текущая обмотка должна постоянно превышать максимальную допустимую обмотку возбуждения, текущую перед поведенческим отказом, инициировано.
Зависимости
Чтобы включить этот параметр, установите Enable field winding open-circuit fault на Yes и Field winding fault trigger к Behavioral.
Reporting when a fault occurs — Создание отчетов, когда отказ происходит
None (значение по умолчанию) | Warn | Error
Симуляция, сообщающая, когда отказ происходит:
None — Не генерирует предупреждение или ошибку.
Warn — Генерирует предупреждение.
Error — Симуляция останавливает и генерирует ошибку.
Зависимости
Чтобы включить этот параметр, установите Enable armature winding open-circuit fault или Enable field winding open-circuit fault к Yes.
Ссылки
[1] Болтон, W. Механотроника: Системы Электронного управления в Машиностроении и Электротехнике, 3-м выпуске Образование Пирсона, 2004..
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2008a