Примените геометрическое преобразование к ограничительным рамкам
bboxB = bboxwarp( преобразовывает ограничительные рамки в bboxA,tform,ref)bboxA согласно геометрическому преобразованию, заданному tform. Ограничительные рамки могут быть выровненными осью прямоугольниками, вращаемыми прямоугольниками или кубоидами. Пространственный ссылочный объект, ref, задает выходное представление, в которое преобразовываются поля.
[___] = bboxwarp(___,'OverlapThreshold', дополнительно устанавливает порог перекрытия.threshold)
Считайте изображение.
I = imread('peppers.png');Задайте ограничительные рамки и метки.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Задайте преобразование, чтобы горизонтально инвертировать и перевести изображение.
tform = affine2d([-1 0 0; 0 1 0; 50 50 1]);
Создайте выходное представление для imwarp.
rout = affineOutputView(size(I),tform);
Деформируйте изображение.
J = imwarp(I,tform,'OutputView',rout);Деформируйте поля.
[bboxB,indices] = bboxwarp(bboxA,tform,rout); labelsB = labelsA(indices);
Отобразите результаты.
annotatedI = insertObjectAnnotation(I,'Rectangle',bboxA,labelsA); annotatedJ = insertObjectAnnotation(J,'Rectangle',bboxB,labelsB); figure montage({annotatedI, annotatedJ})
![]()
bboxA — Ограничительные рамкиОграничительные рамки в виде M-by-4, M-by-5, или M-by-9 неразреженная числовая матрица ограничительных рамок M. Каждая строка, M, матрицы задают ограничительную рамку или как выровненный осью прямоугольник, вращать прямоугольник или как кубоид. Приведенная ниже таблица описывает формат ограничительных рамок.
| Boundingbox | Описание |
|---|---|
| Выровненный осью прямоугольник |
Заданный в пикселе координирует как M-by-4 числовая матрица со строками формы [x y w h], где:
|
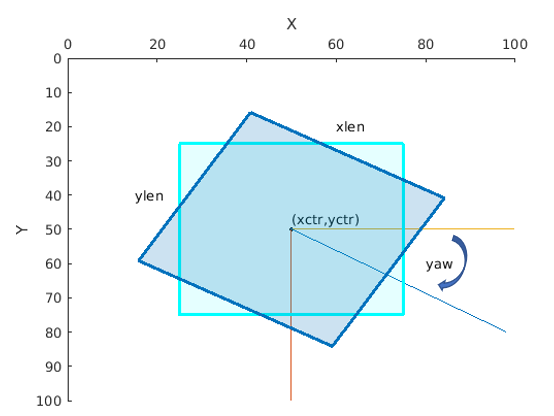
| Вращаемый прямоугольник |
Заданный в пространственных координатах как M-by-5 числовая матрица со строками формы [xctr yctr xlen ylen yaw], где:
|
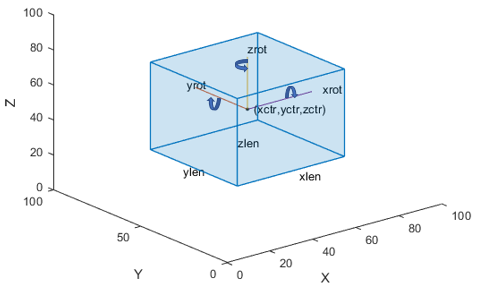
| Кубоид |
Заданный в пространственных координатах как M-by-9 числовая матрица со строками формы [xctr yctr zctr xlen ylen zlen xrot yrot zrot], где:
Рисунок показывает, как эти значения определяют положение кубоида.
|
tform — Геометрическое преобразованиеaffine2d объект (значение по умолчанию)Геометрическое преобразование, заданное в affine2d объект. функция bboxwarp поддерживает только шкалу, вращение и аффинные преобразования перевода.
ref — Пространственная ссылкаimref2d объектПространственная ссылка в виде imref2d объект, возвращенный imwarp или affineOutputView функция. Объект задает выходное представление, чтобы преобразовать поля. Поля, которые преобразовываются полностью за пределами выходного представления, заданного ref отбрасываются.
[J,rout] = imwarp(I,tform); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
rout = affineOutputView(size(I),tform) J = imwarp(I,tform,'OutputView',rout); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
threshold — Перекройте порог1Перекройте порог в виде положительной скалярной величины, меньше чем или равной 1. Сумма перекрытия между преобразованными полями и областью, заданной выходным представлением, задана как:
область (bbox пересекают bounding rectangle) / область (bbox)
Если вычисленное значение перекрытия больше значения threshold свойство, затем преобразованные поля отсекаются к границе ограничительного прямоугольника. В противном случае поля отбрасываются. Понижение порога может привести к частям отбрасываемого объекта.
bboxcrop | bboxresize | imcrop | imwarp