Создайте объекты обнаружения из радарных измерений
Radar Detection Generator не рекомендуется, если вы не требуете генерации кода C/C++. Используйте Driving Radar Data Generator вместо этого. Для получения дополнительной информации см. Вопросы совместимости.
Automated Driving Toolbox / Управление Сценарием и Моделирование Датчика
Блок Radar Detection Generator генерирует обнаружения от радарных измерений, проведенных радарным датчиком, смонтированным на автомобиле, оборудованном датчиком. Обнаружения выведены из симулированных положений агента и сгенерированы с промежутками равные интервалу обновления датчика. По умолчанию на обнаружения ссылаются к системе координат автомобиля, оборудованного датчиком. Генератор может симулировать действительные обнаружения с добавленным случайным шумом и также сгенерировать ложные сигнальные обнаружения. Статистическая модель генерирует шум измерения, истинные обнаружения и ложные положительные стороны. Случайными числами, сгенерированными статистической моделью, управляют настройки генератора случайных чисел на вкладке Measurements. Можно использовать Radar Detection Generator, чтобы создать вход с блоком Multi-Object Tracker. При создании сценариев и моделей датчика с помощью приложения Driving Scenario Designer, выводятся радарные датчики, экспортируемые в Simulink®, когда Radar Detection Generator блокируется.
Actors — Положения агента сценарияАгент сценария позирует в координатах автомобиля, оборудованного датчиком в виде шины Simulink, содержащей структуру MATLAB.
Структура должна содержать эти поля.
| Поле | Описание | Ввод |
|---|---|---|
NumActors | Количество агентов | Неотрицательное целое число |
Time | Текущее время симуляции | Скаляр с действительным знаком |
Actors | Положения агента | NumActors- массив длины агента излагает структуры |
Каждая структура положения агента в Actors должен содержать эти поля.
| Поле | Описание |
|---|---|
ActorID | Заданный сценарием идентификатор агента в виде положительного целого числа. |
Position | Положение агента в виде вектора с действительным знаком из формы [x y z]. Модули исчисляются в метрах. |
Velocity | Скорость (v) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [v x v y v z]. Модули исчисляются в метрах в секунду. |
Roll | Угол вращения агента в виде скаляра с действительным знаком. Модули в градусах. |
Pitch | Передайте угол агента в виде скаляра с действительным знаком. Модули в градусах. |
Yaw | Угол рыскания агента в виде скаляра с действительным знаком. Модули в градусах. |
AngularVelocity | Скорость вращения (ω) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [ω x ω y ω z]. Модули в градусах в секунду. |
Detections — ОбнаруженияОбнаружения объектов, возвращенные как шина Simulink, содержащая структуру MATLAB. Для получения дополнительной информации о шинах, смотрите, Создают Невиртуальные Шины (Simulink).
Можно передать обнаружения объектов от этих датчиков и других датчиков к средству отслеживания, таких как блок Multi-Object Tracker, и сгенерировать дорожки.
| Поле | Описание | Ввод |
|---|---|---|
NumDetections | Количество обнаружений | целое число |
IsValidTime | Ложь, когда обновления время от времени требуют, которые являются между интервалами вызова блока | Булевская переменная |
Detections | Обнаружения объектов | Массив структур обнаружения объектов длины установлен параметром Maximum number of reported detections. Только NumDetections из них фактические обнаружения. |
Каждая структура обнаружения объектов содержит эти свойства.
| Свойство | Определение |
|---|---|
Time | Время измерения |
Measurement | Объектные измерения |
MeasurementNoise | Ковариационная матрица шума измерения |
SensorIndex | Уникальный идентификатор датчика |
ObjectClassID | Предметная классификация |
ObjectAttributes | Дополнительная информация передала средству отслеживания |
MeasurementParameters | Параметры используются функциями инициализации нелинейного Кальмана, отслеживающего фильтры |
Для Декартовых координат, Measurement и MeasurementNoise сообщаются в системе координат, заданной параметром Coordinate system used to report detections.
Для сферических координат, Measurement и MeasurementNoise сообщаются в сферической системе координат на основе Декартовой системы координат датчика.
Измерение и шум измерения
| Coordinate System Used to Report Detections | Измерение и координаты шума измерения | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Ego Cartesian' |
Координатная зависимость от Enable range rate measurements
| |||||||||||||||
'Sensor Cartesian' | ||||||||||||||||
'Sensor spherical' |
Координатная зависимость от Enable elevation angle measurements и Enable range rate measurements
|
MeasurementParameters
| Параметр | Определение |
|---|---|
Frame | Перечислимый тип, указывающий на систему координат раньше, сообщал об измерениях. Когда Frame установлен в 'rectangular', об обнаружениях сообщают в Декартовых координатах. Когда Frame набор 'spherical', об обнаружениях сообщают в сферических координатах. |
OriginPosition | 3-D векторное смещение источника датчика от источника автомобиля, оборудованного датчиком. Вектор выведен из SensorLocation и Height свойства заданы в radarDetectionGenerator. |
Orientation | Ориентация радарной системы координат датчика относительно системы координат автомобиля, оборудованного датчиком. Ориентация выведена из YawТангаж, и Roll свойства radarDetectionGenerator. |
HasVelocity | Указывает, содержат ли измерения скорость или компоненты уровня области значений. |
HasElevation | Указывает, содержат ли измерения компоненты вертикального изменения. |
ObjectAttributes свойство каждого обнаружения является структурой с этими полями.
| Поле | Определение |
|---|---|
TargetIndex | Идентификатор агента, ActorID, это сгенерировало обнаружение. Для ложных предупреждений это значение отрицательно. |
SNR | Отношение сигнал-шум обнаружения. Модули находятся в дБ. |
Unique identifier of sensor — Уникальный идентификатор датчикаУникальный идентификатор датчика в виде положительного целого числа. Идентификатор датчика отличает обнаружения, которые прибывают из различных датчиков в системе мультидатчика. Если модель содержит несколько блоков датчика с тем же идентификатором датчика, Bird's-Eye Scope отображает ошибку.
Пример 5
Required interval between sensor updates (s) — Необходимый временной интервалНеобходимый временной интервал между датчиком обновляется в виде положительного действительного скаляра. Значение этого параметра должно быть целочисленным кратным интервал данных о входном порте Actors. Обновления, которые требуют от датчика между интервалами обновления, не содержат обнаружений. Модули находятся в секундах.
Sensor's (x,y) position (m) — Местоположение радарного центра датчикаМестоположение радарного датчика сосредотачивается в виде вектора 1 на 2 с действительным знаком. Sensor's (x,y) position (m) и параметры Sensor's height (m) задают координаты радарного датчика относительно системы координат автомобиля, оборудованного датчиком. Значение по умолчанию соответствует радару, смонтированному в центре передней решетки седана. Модули исчисляются в метрах.
Sensor's height (m) — Радарная высота датчика над землей плоскостьРадарная высота датчика над землей плоскость в виде положительного действительного скаляра. Высота задана относительно наземной плоскости транспортного средства. Sensor's (x,y) position (m) и параметры Sensor's height (m) задают координаты радарного датчика относительно системы координат автомобиля, оборудованного датчиком. Значение по умолчанию соответствует радару, смонтированному в центре передней решетки седана. Модули исчисляются в метрах.
Пример: 0.25
Yaw angle of sensor mounted on ego vehicle (deg) — Угол рыскания датчикаУгол рыскания радарного датчика в виде действительного скаляра. Угол рыскания является углом между центральной линией автомобиля, оборудованного датчиком и downrange осью радарного датчика. Положительный угол рыскания соответствует по часовой стрелке вращение при взгляде в положительном направлении z - ось системы координат автомобиля, оборудованного датчиком. Модули в градусах.
Пример: -4.0
Pitch angle of sensor mounted on ego vehicle (deg) — Передайте угол датчикаПередайте угол датчика в виде действительного скаляра. Угол тангажа является углом между downrange осью радарного датчика и плоскостью x-y системы координат автомобиля, оборудованного датчиком. Положительный угол тангажа соответствует по часовой стрелке вращение при взгляде в положительном направлении y - ось системы координат автомобиля, оборудованного датчиком. Модули в градусах.
Пример: 3.0
Roll angle of sensor mounted on ego vehicle (deg) — Угол вращения датчикаУгол вращения радарного датчика в виде действительного скаляра. Угол вращения является углом вращения downrange оси радара вокруг x - ось системы координат автомобиля, оборудованного датчиком. Положительный угол вращения соответствует по часовой стрелке вращение при взгляде в положительном направлении x - ось системы координат. Модули в градусах.
Source of output bus name — Источник имени выходной шиныAuto (значение по умолчанию) | PropertyИсточник выходной шины называет в виде Auto или Property. Если вы выбираете Auto, блок автоматически создаст имя шины. Если вы выбираете Property, задайте имя шины с помощью параметра Specify an output bus name.
Пример: Property
Specify an output bus name — Имя выходной шиныИмя выходной шины.
Чтобы включить этот параметр, установите параметр Source of output bus name на Property.
Maximum number of reported detections — Максимальное количество обнаружений, о которых сообщают,Максимальное количество обнаружений, о которых сообщает датчик в виде положительного целого числа. Об обнаружениях сообщают в порядке увеличивающегося расстояния от датчика, пока максимальное количество не достигнуто.
Пример: 100
Coordinate system used to report detections — Система координат обнаружений, о которых сообщают,Ego Cartesian (значение по умолчанию) | Sensor Cartesian | Sensor SphericalСистема координат обнаружений, о которых сообщают, в виде одного из этих значений:
Ego Cartesian — Об обнаружениях сообщают в Декартовой системе координат автомобиля, оборудованного датчиком.
Sensor Cartesian— Об обнаружениях сообщают в Декартовой системе координат датчика.
Sensor spherical — Об обнаружениях сообщают в сферической системе координат. Эта система координат сосредоточена в радаре и выровнена с ориентацией радара на автомобиле, оборудованном датчиком.
Simulate using — Тип симуляции, чтобы запуститьсяInterpreted execution (значение по умолчанию) | Code generationInterpreted execution — Симулируйте модель с помощью интерпретатора MATLAB. Эта опция сокращает время запуска. В Interpreted execution режим, можно отладить исходный код блока.
Code generation — Симулируйте модель с помощью, сгенерировал код C/C++. В первый раз, когда вы запускаете симуляцию, Simulink генерирует код C/C++ для блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска.
Azimuthal resolution of radar (deg) — Разрешение азимута радараРазрешение азимута радара в виде положительного действительного скаляра. Разрешение азимута задает минимальное разделение в углу азимута, под которым радар может отличить две цели. Разрешение азимута обычно является 3dB-downpoint в угловой ширине луча азимута радара. Модули в градусах.
Пример: 6.5
Elevation resolution of radar (deg) — Разрешение вертикального изменения радараРазрешение вертикального изменения радара в виде положительного действительного скаляра. Разрешение вертикального изменения задает минимальное разделение в угле возвышения, в котором радар может отличить две цели. Разрешение вертикального изменения обычно является 3dB-downpoint в ширине луча угла возвышения радара. Модули в градусах.
Пример: 3.5
Чтобы включить этот параметр, установите флажок Enable elevation angle measurements.
Range resolution of radar (m) — Разрешение области значений радараРазрешение области значений радара в виде положительного действительного скаляра. Разрешение области значений задает минимальное разделение в области значений, в которой радар может различать две цели. Модули исчисляются в метрах.
Пример: 5.0
Range rate resolution of radar (m/s) — Разрешение уровня области значений радараРазрешение уровня области значений радара в виде положительного действительного скаляра. Разрешение уровня области значений задает минимальное разделение в уровне области значений, на котором радар может различать две цели. Модули исчисляются в метрах в секунду.
Пример: 0.75
Чтобы включить этот параметр, установите флажок Enable range rate measurements.
Fractional azimuthal bias component of radar — Часть смещения азимутаЧасть смещения азимута радара в виде неотрицательного действительного скаляра. Смещение азимута описывается как часть разрешения азимута, заданного в параметре Azimuthal resolution of radar (deg). Модули являются безразмерными.
Пример: 0.3
Fractional elevation bias component of radar — Часть смещения вертикального измененияЧасть смещения вертикального изменения радара в виде неотрицательного действительного скаляра. Смещение вертикального изменения описывается как часть разрешения вертикального изменения, заданного в параметре Elevation resolution of radar (deg). Модули являются безразмерными.
Пример: 0.2
Чтобы включить этот параметр, установите флажок Enable elevation angle measurements.
Fractional range bias component of radar — Часть смещения области значенийЧасть смещения области значений радара в виде неотрицательного действительного скаляра. Смещение области значений описывается как часть разрешения области значений, заданного в параметре Range resolution of radar (m). Модули являются безразмерными.
Пример: 0.15
Fractional range rate bias component of radar — Уровень области значений смещает часть радараУровень области значений смещает часть радара в виде неотрицательного действительного скаляра. Смещение уровня области значений описывается как часть разрешения уровня области значений, заданного в параметре Range rate resolution of radar (m). Модули являются безразмерными.
Пример: 0.2
Чтобы включить этот параметр, установите флажок Enable range rate measurements.
Total angular field of view for radar (deg) — Поле зрения радарного датчикаПоле зрения радарного датчика в виде вектора 1 на 2 с действительным знаком положительных значений, [azfov elfov]. Поле зрения задает угловую степень, заполненную датчиком. Каждый компонент должен лечь в интервале (0,180]. Цели за пределами поля зрения радара не обнаруживаются. Модули в градусах.
Пример: [14 7]
Maximum detection range (m) — Максимальная область значений обнаруженияМаксимальная область значений обнаружения в виде положительного действительного скаляра. Радар не может обнаружить цель вне этой области значений. Модули исчисляются в метрах.
Пример: 250
Minimum and maximum range rates that can be reported — Минимальные и максимальные уровни области значений обнаруженияМинимальные и максимальные уровни области значений обнаружения в виде вектора 1 на 2 с действительным знаком. Радар не может обнаружить цель за пределами этого интервала уровня области значений. Модули исчисляются в метрах в секунду.
Пример: [-200 200]
Чтобы включить этот параметр, установите флажок Enable range rate measurements.
Detection probability — Вероятность обнаружения целиВероятность обнаружения цели в виде положительного действительного скаляра, меньше чем или равного одному. Это количество задает вероятность обнаружения цели, которой задал радарное поперечное сечение параметр Radar cross section at which detection probability is achieved (dBsm) в ссылочном диапазоне обнаружения, указанном параметром Range where detection probability is achieved (m).
Пример: 0.95
Rate at which false alarms are reported — Ложный сигнальный уровень1e-6 (значение по умолчанию) | положительный действительный скалярЛожный сигнальный уровень в радарной ячейке разрешения в виде положительного действительного скаляра в области значений [10–7, 10–3]. Модули являются безразмерными.
Пример: 1e-5
Range where detection probability is achieved (m): — Диапазон ссылки для данной вероятности обнаруженияДиапазон ссылки для данной вероятности обнаружения в виде положительного действительного скаляра. Диапазон ссылки является областью значений, когда цель, задающая радарное поперечное сечение Radar cross section at which detection probability is achieved (dBsm), обнаруживается с вероятностью заданных Detection probability. Модули исчисляются в метрах.
Пример: 150
Radar cross section at which detection probability is achieved (dBsm) — Ссылочное радарное поперечное сечение для данной вероятности обнаруженияСсылочное радарное поперечное сечение (RCS) для данной вероятности обнаружения в виде неотрицательного действительного скаляра. Ссылочный RCS является значением, в котором цель обнаруживается с вероятностью, заданной Detection probability. Модули находятся в dBsm.
Пример: 2.0
Enable elevation angle measurements — Позвольте радару измерить вертикальное изменениеoff (значение по умолчанию) | onУстановите этот флажок, чтобы смоделировать радар, который может измерить целевые углы возвышения.
Enable range rate measurements — Позвольте радару измерить уровень области значенийon (значение по умолчанию) | off | onУстановите этот флажок, чтобы смоделировать радар, который может измерить уровень целевого диапазона.
Add noise to measurements — Позвольте добавить шум в радарные измерения датчикаon (значение по умолчанию) | offУстановите этот флажок, чтобы добавить шум в радарные измерения датчика. В противном случае измерения бесшумны. MeasurementNoise свойство каждого обнаружения всегда вычисляется и не затронуто значением, которое вы задаете для параметра Add noise to measurements. Путем отъезда этого флажка off, можно передать измерения основной истины датчика в блок Multi-Object Tracker.
Enable false detections — Позвольте создать ложные сигнальные радарные обнаруженияon (значение по умолчанию) | offУстановите этот флажок, чтобы позволить сообщить о ложных сигнальных радарных измерениях. В противном случае только о фактических обнаружениях сообщают.
Select method to specify initial seed — Метод, чтобы задать seed генератора случайных чиселRepeatable (значение по умолчанию) | Specify seed | Not repeatableМетод, чтобы установить seed генератора случайных чисел в виде одной из опций в таблице.
| Опция | Описание |
|---|---|
Repeatable | Блок генерирует случайный начальный seed для первой симуляции и снова использует этот seed для всех последующих симуляций. Выберите этот параметр, чтобы сгенерировать повторяемые результаты статистической модели датчика. Изменить этот начальный seed, в командной строке MATLAB, введите: |
Specify seed | Задайте свой собственный случайный начальный seed для восстанавливаемых результатов при помощи параметра Specify seed. |
Not repeatable | Блок генерирует новый случайный начальный seed после каждой запущенной симуляции. Выберите этот параметр, чтобы сгенерировать неповторяемые результаты статистической модели датчика. |
Initial seed — Seed генератора случайных чиселSeed генератора случайных чисел в виде неотрицательного целого числа меньше чем 232.
Пример: 2001
Чтобы включить этот параметр, установите Random Number Generator Settings параметр к Specify seed.
Select method to specify actor profiles — Метод, чтобы задать профили агентаFrom Scenario Reader block (значение по умолчанию) | Parameters | MATLAB expressionМетод, чтобы задать профили агента, которые являются физическими характеристиками и радарными характеристиками всех агентов в ведущем сценарии в виде одной из этих опций:
From Scenario Reader block — Блок получает профили агента из сценария, заданного блоком Scenario Reader.
Parameters — Блок получает профили агента из параметров, которые становятся активированными на вкладке Actor Profiles.
From workspace — Блок получает профили агента из выражения MATLAB, заданного параметром MATLAB expression for actor profiles.
MATLAB expression for actor profiles — Выражение MATLAB для профилей агентаstruct('ClassID',0,'Length',4.7,'Width',1.8,'Height',1.4,'OriginOffset',[-1.35,0,0]) (значение по умолчанию) | структура MATLAB | массив структур MATLAB | допустимое выражение MATLABВыражение MATLAB для агента профилирует в виде структуры MATLAB, массива структур MATLAB или допустимого выражения MATLAB, которое производит такую структуру или массив структур.
Если ваш блок Scenario Reader считывает данные из drivingScenario объект, чтобы получить профили агента непосредственно из этого объекта, установил это выражение вызывать actorProfiles функция на объекте. Например: actorProfiles(scenario).
Пример: struct('ClassID',5,'Length',5.0,'Width',2,'Height',2,'OriginOffset',[-1.55,0,0])
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на MATLAB expression.
Unique identifier for actors — Заданный сценарием идентификатор агента[] (значение по умолчанию) | положительное целое число | вектор длины-L из уникальных положительных целых чиселЗаданный сценарием идентификатор агента в виде положительного целого числа или вектора длины-L из уникальных положительных целых чисел. L должен равняться количеству входа агентов во входной порт Actor. Векторные элементы должны совпадать с ActorID значения агентов. Можно задать Unique identifier for actors как []. В этом случае те же параметры профиля агента применяются ко всем агентам.
Пример: [1,2]
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
User-defined integer to classify actors — Пользовательский идентификатор классификацииПользовательский идентификатор классификации в виде целого числа или вектора длины-L из целых чисел. Когда Unique identifier for actors является вектором, этот параметр является вектором из той же длины с элементами во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как одно целое число, значение которого применяется ко всем агентам.
Пример 2
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Length of actors cuboids (m) — Длина кубоидаДлина кубоида в виде положительного действительного скаляра или вектора длины-L из положительных значений. Когда Unique identifier for actors является вектором, этот параметр является вектором из той же длины с элементами во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как положительный действительный скаляр, значение которого применяется ко всем агентам. Модули исчисляются в метрах.
Пример: 6.3
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Width of actors cuboids (m) — Ширина кубоидаШирина кубоида в виде положительного действительного скаляра или вектора длины-L из положительных значений. Когда Unique identifier for actors является вектором, этот параметр является вектором из той же длины с элементами во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как положительный действительный скаляр, значение которого применяется ко всем агентам. Модули исчисляются в метрах.
Пример: 4.7
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Height of actors cuboids (m) — Высота кубоидаВысота кубоида в виде положительного действительного скаляра или вектора длины-L из положительных значений. Когда Unique identifier for actors является вектором, этот параметр является вектором из той же длины с элементами во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как положительный действительный скаляр, значение которого применяется ко всем агентам. Модули исчисляются в метрах.
Пример: 2.0
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Rotational center of actors from bottom center (m) — Вращательный центр агентаВращательный центр агента в виде массива ячеек длины-L с действительным знаком 1 3 векторы. Каждый вектор представляет смещение вращательного центра агента от нижнего центра агента. Для транспортных средств смещение соответствует точке на земле ниже центра задней оси. Когда Unique identifier for actors является вектором, этот параметр является массивом ячеек векторов с ячейками во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как массив ячеек одного элемента, содержащего вектор смещения, значения которого применяются ко всем агентам. Модули исчисляются в метрах.
Пример: [-1.35.2.3]
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Radar cross section pattern (dBsm) — Радарное поперечное сечениеРадарное поперечное сечение (RCS) агента в виде Q с действительным знаком-by-P матрица или массив ячеек длины-L Q с действительным знаком-by-P матрицы. Q является количеством углов возвышения, заданных соответствующей ячейкой в параметре Elevation angles defining RCSPattern (deg). P является количеством углов азимута, заданных соответствующей ячейкой в свойстве Azimuth angles defining RCSPattern (deg). Когда Unique identifier for actors является вектором, этот параметр является массивом ячеек матриц с ячейками во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Q и P могут варьироваться по массиву ячеек. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как массив ячеек с одним элементом, содержащим матрицу, значения которой применяются ко всем агентам. Модули находятся в dBsm.
Пример: [10 14 10; 9 13 9]
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Azimuth angles defining RCSPattern (deg) — Углы азимута радарного шаблона поперечного сеченияУглы азимута радарного шаблона поперечного сечения в виде массива ячеек длины-L P с действительным знаком - векторы длины. Каждый вектор представляет углы азимута P - столбцы радарного сечения, заданного в Radar cross section pattern (dBsm). Когда Unique identifier for actors является вектором, этот параметр является массивом ячеек векторов с ячейками во взаимно-однозначном соответствии к агентам в Unique identifier for actors. P может варьироваться по массиву ячеек. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как массив ячеек с одним элементом, содержащим вектор, значения которого применяются ко всем агентам. Модули в градусах. Углы азимута лежат в области значений-180 ° к 180 ° и должны быть в строго увеличивающемся порядке.
Когда радарные сечения задали в ячейках Radar cross section pattern (dBsm), у всех есть те же размерности, вы должны только задать массив ячеек с одним элементом, содержащим угловой вектор азимута.
Пример: [-90:90]
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
Elevation angles defining RCSPattern (deg) — Углы возвышения радарного шаблона поперечного сеченияУглы возвышения радарного шаблона поперечного сечения в виде массива ячеек длины-L Q с действительным знаком - векторы длины. Каждый вектор представляет углы возвышения Q - столбцы радарного сечения, заданного в Radar cross section pattern (dBsm). Когда Unique identifier for actors является вектором, этот параметр является массивом ячеек векторов с ячейками во взаимно-однозначном соответствии к агентам в Unique identifier for actors. Q может варьироваться по массиву ячеек. Когда Unique identifier for actors пуст, [], необходимо задать этот параметр как массив ячеек с одним элементом, содержащим вектор, значения которого применяются ко всем агентам. Модули в градусах. Углы возвышения лежат в области значений-90 ° к 90 ° и должны быть в строго увеличивающемся порядке.
Когда радарные сечения, которые заданы в ячейках Radar cross section pattern (dBsm), у всех есть те же размерности, вы должны только задать массив ячеек с одним элементом, содержащим вектор угла возвышения.
Пример: [-25:25]
Чтобы включить этот параметр, установите параметр Select method to specify actor profiles на Parameters.
radarDetectionGenerator Системный объект и блок Radar Detection Generator не рекомендуютсяНе рекомендуемый запуск в R2021a
radarDetectionGenerator Система object™ и блок Radar Detection Generator не рекомендуется, если вы не требуете генерации кода C/C++. Вместо этого используйте drivingRadarDataGenerator Системный объект и Driving Radar Data Generator, соответственно. Эти новые радарные датчики обеспечивают дополнительные свойства для моделирования радарных датчиков, включая способность сгенерировать дорожки и кластеризируемые обнаружения.
Нет никаких текущих планов удалить radarDetectionGenerator Системный объект или блок Radar Detection Generator. Код MATLAB и модели Simulink, которые используют эти функции, продолжат запускаться. Можно все еще импортировать radarDetectionGenerator объекты в приложение Driving Scenario Designer. Однако обновления приложения параметры импортированного датчика, чтобы отразить параметры drivingRadarDataGenerator объект. Кроме того, когда вы экспортируете сценарий, содержащий radarDetectionGenerator датчик к коду MATLAB или к модели Simulink, приложение экспортирует датчик как drivingRadarDataGenerator объект или блок Driving Radar Data Generator, соответственно.
В коде MATLAB замените все экземпляры radarDetectionGenerator с drivingRadarDataGenerator. Кроме того, обновите весь radarDetectionGenerator свойства с их эквивалентным drivingRadarDataGenerator свойства, как показано в таблице. Свойства, не перечисленные в таблице, любой характерны только для drivingRadarDataGenerator или идентичный в обоих объектах.
radarDetectionGenerator Свойства | Эквивалентный drivingRadarDataGenerator Свойства |
|---|---|
|
|
|
|
|
|
| RangeLimits |
|
|
|
|
|
|
Эта таблица показывает пример кода для создания drivingRadarDataGenerator объект вместо radarDetectionGenerator объект.
| Нежелательное использование | Рекомендуемая замена |
|---|---|
radar = radarDetectionGenerator( ... 'SensorLocation',[-1 0], ... 'Height',0.2, ... 'Yaw',180, ... 'Pitch',0, ... 'Roll',0, ... 'MaxRange',50); | radar = drivingRadarDataGenerator( ... 'MountingLocation',[-1 0 0.2], ... 'MountingAngles',[180 0 0], ... 'RangeLimits',[0 50]); |
Чтобы сгенерировать обнаружения от целевых положений на каждом шаге времени симуляции, замените dets = radarDetectionGenerator(targets,time) синтаксис с dets = drivingRadarDataGenerator(targets,time).
В моделях Simulink замените все блоки Radar Detection Generator на блоки Driving Radar Data Generator. В блоках Driving Radar Data Generator обновите значения параметров таким же образом, вы обновили бы drivingRadarDataGenerator значения свойств описаны в Секции кода Обновления.
Если ваша модель содержит отдельный блок, что обнаружения кластеров, можно удалить ее потому что обнаружения кластеров блока Driving Radar Data Generator по умолчанию.
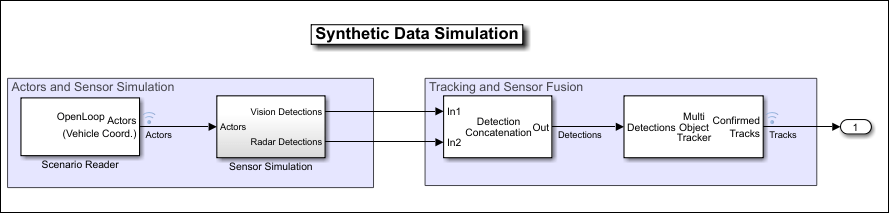
Например, в этой модели, подсистема Симуляции Датчика выходные параметры конкатенировали обнаружения от блоков Radar Detection Generator в отдельный блок, это кластеризирует обнаружения.

В этой модели подсистема Симуляции Датчика выходные параметры конкатенированные, кластеризируемые обнаружения от Driving Radar Data Generator блокируется непосредственно в следующую часть конвейера модели.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
