Оцените модель в пространстве состояний с помощью метода подпространства с данными частотного диапазона или временным интервалом
sys = n4sid(data,nx)sys из порядка nx использование data, который может быть данные частотного диапазона или временной интервал. sys модель следующей формы:
A, B, C, D и K являются матрицами пространства состояний. u (t) является входом, y (t) является выход, e (t) является воздействием, и x (t) является вектором из nx состояния.
Все записи A, B, C и K являются свободными допускающими оценку параметрами по умолчанию. Для динамических систем D фиксируется, чтобы обнулить по умолчанию, означая, что система не имеет никакого сквозного соединения. Для статических систем (nx = 0), D является допускающим оценку параметром по умолчанию.
sys = n4sid(data,nx,Name,Value)'Ts' как 0. Используйте 'Form', 'Feedthrough', и 'DisturbanceModel' аргументы пары "имя-значение", чтобы изменить поведение по умолчанию A, B, C, D и матриц K.
Оцените модель в пространстве состояний и сравните ее ответ с измеренным выходом.
Загрузите данные ввода - вывода z1, который хранится в iddata объект.
load iddata1 z1
Оцените модель в пространстве состояний четвертого порядка.
nx = 4; sys = n4sid(z1,nx)
sys =
Discrete-time identified state-space model:
x(t+Ts) = A x(t) + B u(t) + K e(t)
y(t) = C x(t) + D u(t) + e(t)
A =
x1 x2 x3 x4
x1 0.8392 -0.3129 0.02105 0.03743
x2 0.4768 0.6671 0.1428 0.003757
x3 -0.01951 0.08374 -0.09761 1.046
x4 -0.003885 -0.02914 -0.8796 -0.03171
B =
u1
x1 0.02635
x2 -0.03301
x3 7.256e-05
x4 0.0005861
C =
x1 x2 x3 x4
y1 69.08 26.64 -2.237 -0.5601
D =
u1
y1 0
K =
y1
x1 0.003282
x2 0.009339
x3 -0.003232
x4 0.003809
Sample time: 0.1 seconds
Parameterization:
FREE form (all coefficients in A, B, C free).
Feedthrough: none
Disturbance component: estimate
Number of free coefficients: 28
Use "idssdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using N4SID on time domain data "z1".
Fit to estimation data: 76.33% (prediction focus)
FPE: 1.21, MSE: 1.087
Сравните симулированный ответ модели с измеренным выходом.
compare(z1,sys)

График показывает, что подходящий процент между симулированной моделью и данными об оценке больше 70%.
Можно просмотреть больше информации об оценке путем исследования idss свойство sys.Report.
sys.Report
ans =
Status: 'Estimated using N4SID with prediction focus'
Method: 'N4SID'
InitialState: 'estimate'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1x1 struct]
Parameters: [1x1 struct]
OptionsUsed: [1x1 idoptions.n4sid]
RandState: [1x1 struct]
DataUsed: [1x1 struct]
Например, узнайте больше информации о предполагаемом начальном состоянии.
sys.Report.Parameters.X0
ans = 4×1
-0.0085
0.0052
-0.0193
0.0282
Загрузите данные ввода - вывода z1, который хранится в iddata объект.
load iddata1 z1
Определите оптимальный порядок модели путем определения аргумента nx как диапазон от 1 до 10.
nx = 1:10; sys = n4sid(z1,nx);
Автоматически сгенерированный график показывает сингулярные значения Ганкеля для моделей порядков, заданных nx.
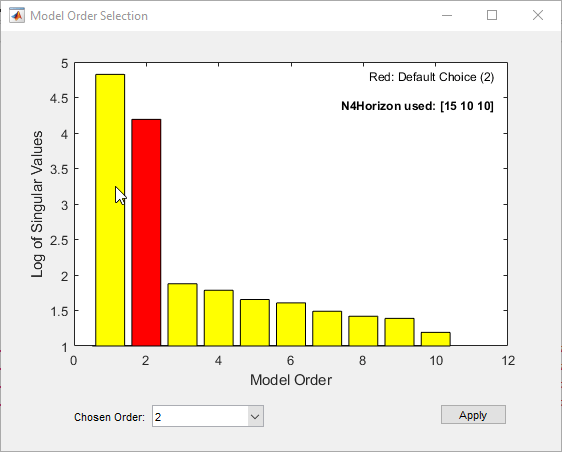
Состояния с относительно маленькими сингулярными значениями Ганкеля могут быть безопасно отброшены. Предложенным выбором порядка по умолчанию является 2.
Выберите порядок модели в Chosen Order, перечисляют и нажимают Apply.
Загрузите данные об оценке.
load iddata2 z2
Задайте опции оценки. Установите схему 'N4Weight' взвешивания к 'SSARX' и параметр отображения состояния оценки 'Display' к 'on'.
opt = n4sidOptions('N4Weight','SSARX','Display','on')
Option set for the n4sid command:
InitialState: 'estimate'
N4Weight: 'SSARX'
N4Horizon: 'auto'
Display: 'on'
InputOffset: []
OutputOffset: []
EstimateCovariance: 1
OutputWeight: []
Focus: 'prediction'
WeightingFilter: []
EnforceStability: 0
Advanced: [1x1 struct]
Оцените модель в пространстве состояний третьего порядка с помощью обновленного набора опции.
nx = 3; sys = n4sid(z2,nx,opt);
Измените каноническую форму A, B, и матрицы C, включайте проходной термин в матрице D и устраните оценку возмущения матрицу K.
Загрузите данные ввода - вывода и оцените систему четвертого порядка с помощью n4sid опции по умолчанию.
load iddata1 z1 sys1 = n4sid(z1,4);
Задайте модальную форму и сравните A матрица с A по умолчанию матрица.
sys2 = n4sid(z1,4,'Form','modal'); A1 = sys1.A
A1 = 4×4
0.8392 -0.3129 0.0211 0.0374
0.4768 0.6671 0.1428 0.0038
-0.0195 0.0837 -0.0976 1.0462
-0.0039 -0.0291 -0.8796 -0.0317
A2 = sys2.A
A2 = 4×4
0.7554 0.3779 0 0
-0.3779 0.7554 0 0
0 0 -0.0669 0.9542
0 0 -0.9542 -0.0669
Включайте проходной термин и сравните D матрицы.
sys3 = n4sid(z1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0487
Устраните моделирование воздействия и сравните K матрицы.
sys4 = n4sid(z1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0033
0.0093
-0.0032
0.0038
K4 = sys4.K
K4 = 4×1
0
0
0
0
Оцените модель канонической формы непрерывного времени.
Загрузите данные об оценке.
load iddata1 z1
Оцените модель. Установите Ts к 0 задавать непрерывную модель.
nx = 2; sys = n4sid(z1,nx,'Ts',0,'Form','canonical');
sys модель в пространстве состояний непрерывного времени второго порядка в канонической форме.
Оцените модель в пространстве состояний из данных с обратной связью с помощью алгоритма подпространства SSARX. Этот алгоритм лучше в получении эффектов обратной связи, чем другие алгоритмы взвешивания.
Сгенерируйте данные об оценке с обратной связью для системы второго порядка, поврежденной белым шумом.
N = 1000; K = 0.5; rng('default'); w = randn(N,1); z = zeros(N,1); u = zeros(N,1); y = zeros(N,1); e = randn(N,1); v = filter([1 0.5],[1 1.5 0.7],e); for k = 3:N u(k-1) = -K*y(k-2) + w(k); u(k-1) = -K*y(k-1) + w(k); z(k) = 1.5*z(k-1) - 0.7*z(k-2) + u(k-1) + 0.5*u(k-2); y(k) = z(k) + 0.8*v(k); end dat = iddata(y, u, 1);
Задайте схему 'N4weight' взвешивания используемый алгоритмом N4SID. Создайте два набора опции. Для одного набора опции, набор 'N4weight' к 'CVA'. Для другого набора опции, набор 'N4weight' к 'SSARX'.
optCVA = n4sidOptions('N4weight','CVA'); optSSARX = n4sidOptions('N4weight','SSARX');
Оцените модели в пространстве состояний с помощью наборов опции.
sysCVA = n4sid(dat,2,optCVA); sysSSARX = n4sid(dat,2,optSSARX);
Сравните припадок этих двух моделей с данными об оценке.
compare(dat,sysCVA,sysSSARX);

Когда график показывает, модель оценила, что использование алгоритма SSARX производит лучшую подгонку, чем модель, оцененная с помощью алгоритма CVA.
[1] Ljung, L. System Identification: Теория для Пользователя, Приложение 4A, Второй Выпуск, стр 132–134. Верхний Сэддл-Ривер, NJ: PTR Prentice Hall, 1999.
[2] ван Оверши, P. и Б. Де Мор. Идентификация подпространства Линейных систем: Теория, Реализация, Приложения. Springer Publishing: 1996.
[3] Verhaegen, M. "Идентификация детерминированной части моделей в пространстве состояний MIMO". Automatica, 1994, Издание 30, стр 61–74.
[4] Larimore, W.E. "Канонический анализ варьируемой величины в идентификации, фильтрации и адаптивном управлении". Продолжения 29-й Конференции по IEEE по Решению и Управлению, 1990, стр 596–604.
[5] Маккельви, T., Х. Аккей и Л. Лджанг. "Основанная на подпространстве многомерная система идентификации из данных о частотной характеристике". Транзакции IEEE на Автоматическом управлении, 1996, Издание 41, стр 960–979.
canon | iddata | idfrd | idgrey | idss | n4sidOptions | pem | polyest | procest | ssest | tfest
