В интерактивном режиме оцените твердое преобразование между датчиком лидара и камерой
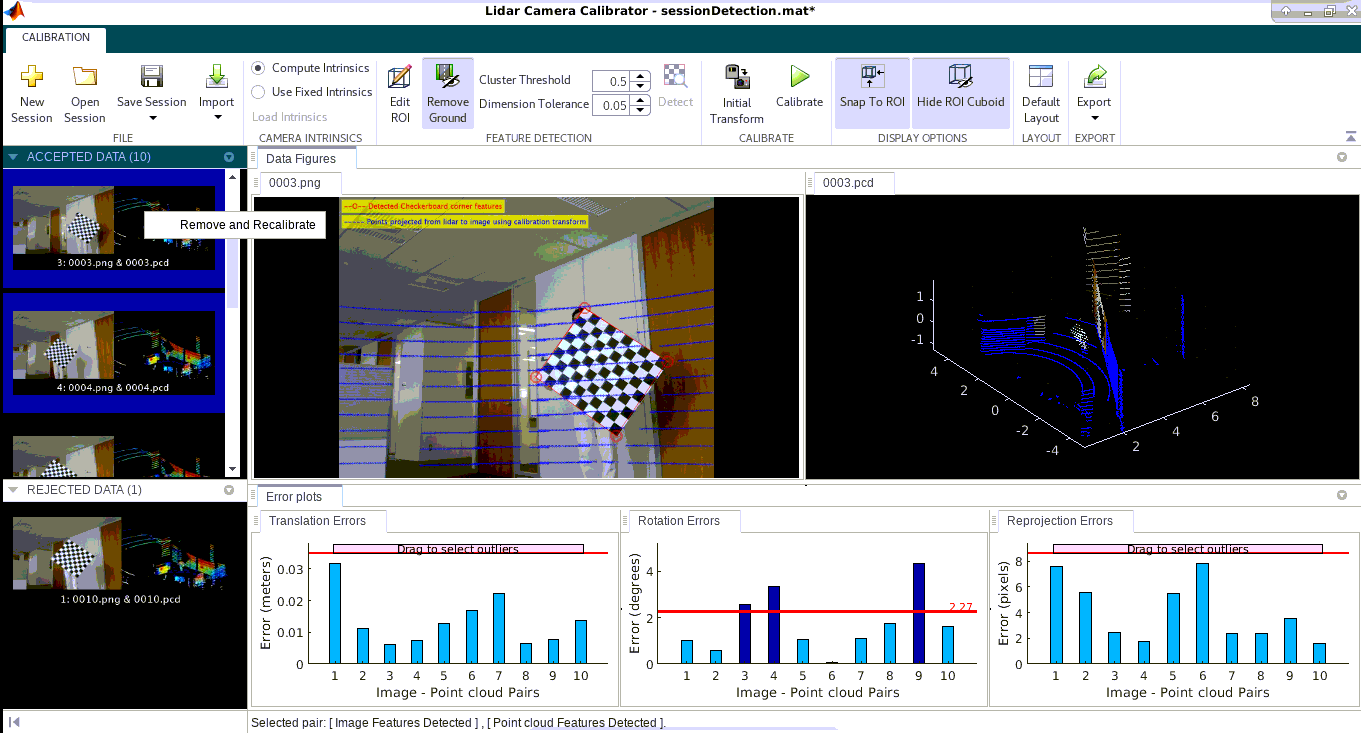
Приложение Lidar Camera Calibrator позволяет вам в интерактивном режиме оценить твердое преобразование между датчиком лидара и камерой. Приложение выполняет калибровку путем чтения калибровочных изображений и облаков точек, полученных пользователем. Приложение считывает данные об облаке точек в PLY и форматах PCAP, и отображает в любом формате, поддержанном imformats.
Используя приложение, вы можете:
Обнаружьте, извлеките и визуализируйте функции шахматной доски из данных об облаке точек и изображения.
Оцените твердое преобразование между камерой и лидаром с помощью результатов выявления признаков.
Используйте калибровочные результаты объединить данные от обоих датчики. Можно визуализировать данные об облаке точек, спроектированные на изображения, и окрасить или полутоновая информация от изображений сплавленный с данными об облаке точек.
Просмотрите нанесенные на график калибровочные ошибочные метрики. Можно удалить выбросы, с помощью пороговой линии, и перекалибровать остающиеся данные.
Задайте видимую область (ROI) вокруг шахматной доски, чтобы уменьшать ресурсы расчета, требуемые процессом оценки преобразования.
Экспортируйте преобразование и ошибочные метрические данные как переменные рабочей области или файлы MAT. Можно также создать скрипт MATLAB® для целого рабочего процесса.
Панель инструментов MATLAB: На вкладке Apps, под Image Processing and Computer Vision, кликают по значку приложения.
Командная строка MATLAB: Войти lidarCameraCalibrator.
