Motor Control Blockset™ обеспечивает блоки Simulink® для создания и настройки ориентированного на поле на управление и другие алгоритмы для бесщеточных двигателей. Блоки включают блоки преобразований Парка и Кларка, sensorless наблюдатели, полевое ослабление, генератор векторной ШИМ и автотюнер FOC. Можно проверить алгоритмы управления в симуляции с обратной связью с помощью моделей двигателя и инвертора, включенных в библиотеку.
Инструмент оценки параметра библиотеки запускает предопределенные тесты на вашем моторном оборудовании для точной оценки сопротивления статора, d - ось и q - составляющая индукции, коэффициент противо-ЭДС, инерция и трение. Можно включить эти значения параметра двигателя в симуляцию с обратной связью, чтобы анализировать проектирование контроллера.
Справочные примеры показывают, как проверить алгоритмы управления в настольной симуляции и сгенерировать компактный код С, который поддерживает уровни выполнения, требуемые для внедрения производственной среды. Справочные примеры могут также использоваться, чтобы реализовать алгоритмы для аппаратных наборов блока управления приводом, поддержанных библиотекой.
Этот пример использует регулирование без обратной связи (также известное как скалярное управление или В/Гц управление), чтобы запустить двигатель.
Оцените параметры двигателя при помощи функции оценки параметра в Motor Control Blockset.
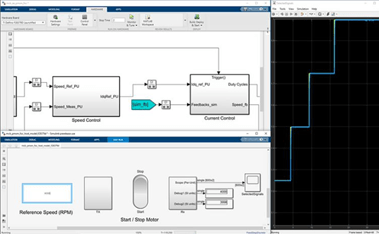
Выполните параметр управления, настраивающийся для скорости, и закрутите подсистемы управления.
Соедините двигатели, датчики и источник питания к аппаратным платам.
Сконфигурируйте модель Simulink, чтобы взаимодействовать через интерфейс с поддерживаемым целевым компьютером.
Управление разомкнутой и замкнутой системами
Описывает разомкнутый контур, блок управления приводом с обратной связью и переход от разомкнутого контура до управления с обратной связью.
Ориентированное на поле управление (FOC)
Реализуйте регулировку скорости для PMSM и асинхронного двигателя при помощи ориентированного на поле управления.
Реализуйте регулировку скорости для двигателя BLDC при помощи коммутации с шестью шагами.
Описывает модель хоста, целевую модель, и как они связываются.
Смещение ADC датчика тока и калибровка датчика положений
Описывает смещения для датчика Холла, квадратурного энкодера и ADC датчика тока.
Система в относительных единицах
Задает систему нормированной единицы при помощи базовых значений.