Соедините начальную букву и терминал состояния Frenet
frenetTrajectory = connect(connectorFrenet,initialState,terminalState,timeSpan)
[___, возвращает траектории в глобальных координатах в дополнение ко всем аргументам в предыдущем синтаксисе.globalTrajectory] = connect(___)
Сгенерируйте альтернативные траектории для ссылочного использования пути координаты Frenet. Задайте различную начальную букву и конечные состояния для ваших траекторий. Настройте свои состояния на основе сгенерированных траекторий.
Сгенерируйте ссылочный путь от набора waypoints. Создайте trajectoryGeneratorFrenet объект от ссылочного пути.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
Сгенерируйте пять вторых траекторий между источником пути и точкой 30 m вниз путь, как Frenet утверждает.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Отобразите траекторию в глобальных координатах.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])

Создайте матрицу конечных состояний с боковыми отклонениями между-3 м и 3 м. Сгенерируйте траектории, которые покрывают ту же длину дуги за 10 секунд, но отклоняются со стороны от ссылочного пути. Отобразите новые альтернативные пути.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,5); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off

Задайте новое конечное состояние, чтобы сгенерировать новую траекторию. Эта траектория не желательна, потому что она требует противоположному движению достигнуть поперечной скорости 10 м/с.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off

Ослабьте ограничение на продольном состоянии путем определения длины дуги NaN. Сгенерируйте и отобразите траекторию снова. Новое положение показывает хорошую альтернативную траекторию, которая отклоняется от ссылочного пути.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off

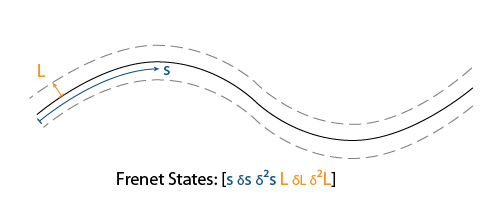
frenetTrajectory — Траектории FrenetТраектории Frenet между всеми начальными и конечными состояниями, возвращенными как массив структур с этими полями:
Trajectory — n-by-6 числовая матрица. Каждая строка матрицы является набором координат Frenet для начального состояния траектории в форме [S dS ddS L dL ddL].
Time — Вектор из положительных скалярных величин от 0 к timeSpan в секундах.
Эта функция поддерживает 1 к n, n-to-1, или n-to-n попарные связи траектории на основе количества строк initialState и terminalState.
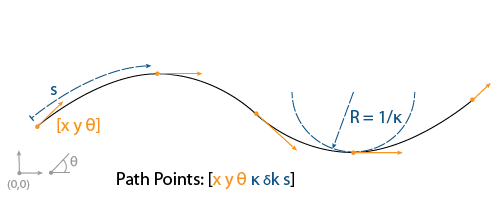
globalTrajectory — Глобальные траекторииГлобальные траектории между всеми начальными и конечными состояниями, возвращенными как структура или массив структур с полями:
Trajectory — n-by-6 числовая матрица. Каждая строка матрицы является набором глобальной переменной, насыщает формы [x y theta kappa dkappa s].
Time — Вектор из положительных скалярных величин от 0 к timeSpan в секундах.
Эта функция поддерживает 1 к n, n-to-1, или n-to-n попарные связи траектории на основе количества строк initialState и terminalState.
