Ротационный привод двойного действия в изотермической жидкой системе
Simscape / Жидкости / Изотермическая Жидкость / Приводы

Блок Double-Acting Rotary Actuator (IL) моделирует ротационный привод в изотермической жидкой сети. Привод преобразует перепад давления между двумя емкостями в механический крутящий момент. Движение поршня, когда это - близкое полное дополнительное или полное сокращение, ограничивается одной из трех моделей жесткого упора.
Порты A и B являются изотермическими жидкими портами сохранения, сопоставленными с входами емкости A, и помещают в камеру B, соответственно. Порт R сопоставлен с валом привода, и порт C сопоставлен со ссылочным преобразованием регистра привода. Если Mechanical orientation установлен в Pressure at A causes positive rotation of R relative to C, давление в емкости причины положительное вращение вала в порте R относительно порта C. Когда угол вала вычисляется внутренне, порт q физического сигнала сообщает об угле вала. Когда угол установлен связью с соединением Simscape™ Multibody™, он получен как физический сигнал в порте q.
Перемещение поршня измеряется как положение в порте R относительно порта C. Mechanical orientation идентифицирует направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем емкости равен емкости мертвый объем. Когда смещение получено как вход, гарантируйте, что производная положения равна поршневой скорости. Это автоматически имеет место, когда вход получен от связи блока Rotational Multibody Interface до соединения Simscape Multibody.
Чтобы избежать механического устройства повреждают на привод, когда оно полностью расширено или в убранном положении, привод обычно отображает нелинейное поведение, когда поршень приближается к этим пределам. Блок Single-Acting Rotary Actuator (IL) моделирует это поведение с выбором трех моделей жесткого упора, которые моделируют существенную податливость через систему пружинного демпфера. Модели жесткого упора:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Сила жесткого упора моделируется, когда поршень в его верхней или нижней границе. Граничная область в Transition region Stroke или поршневого смещения начальной буквы. За пределами этой области,
Для получения дополнительной информации об этих настройках, смотрите страницу блока Упор Вращения.
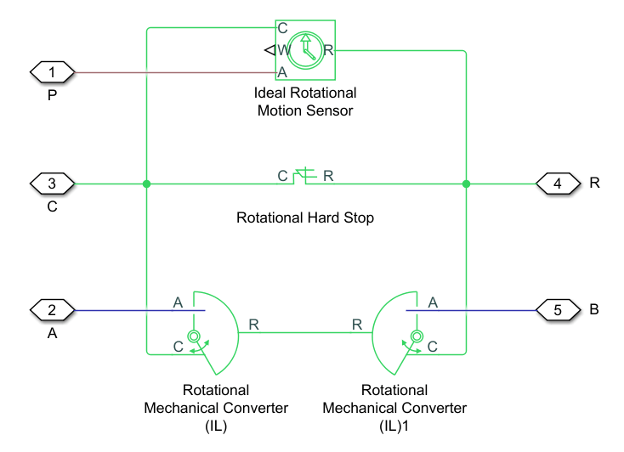
Блок Double-Acting Rotary Actuator (IL) включает три Библиотечных блока Основы:
Лежание в основе компонентов блока
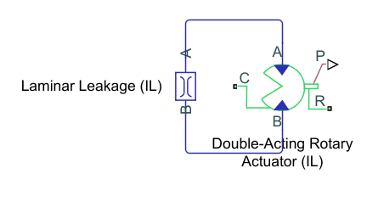
Ламинарная утечка не составляется в блоке Double-Acting Rotary Actuator (IL). Чтобы включать утечку в вашу симуляцию, установите параметр Cross-sectional geometry на Custom и соедините порты A и B к портам A и B блока Laminar Leakage (IL).
Добавление утечки к симуляции
Привод двойного действия (G-IL) | Привод двойного действия (IL) | Вращение гидропривода одностороннего действия (IL) | Гидропривод одностороннего действия (IL) | Ротационный привод одностороннего действия (IL)

