Преобразуйте кватернион в Углы Эйлера (радианы)
eulerAngles = euler(quat,rotationSequence,rotationType)quat, к N-by-3 матрица Углов Эйлера.
quat — Кватернион, чтобы преобразовать в Углы ЭйлераКватернион, чтобы преобразовать в Углы Эйлера в виде скаляра, вектора, матрицы или многомерного массива кватернионов.
Типы данных: quaternion
rotationSequence — Последовательность вращения'ZYX' | 'ZYZ' | 'ZXY' | 'ZXZ' | 'YXZ' | 'YXY' | 'YZX' | 'XYZ' | 'XYX' | 'XZY' | 'XZX'Последовательность вращения Эйлерового представления в виде вектора символов или строки.
Последовательность вращения задает порядок вращений вокруг осей. Например, если вы задаете последовательность вращения 'YZX':
Первое вращение об оси Y.
Второе вращение о новой оси z.
Третье вращение о новой оси X.
Типы данных: char | string
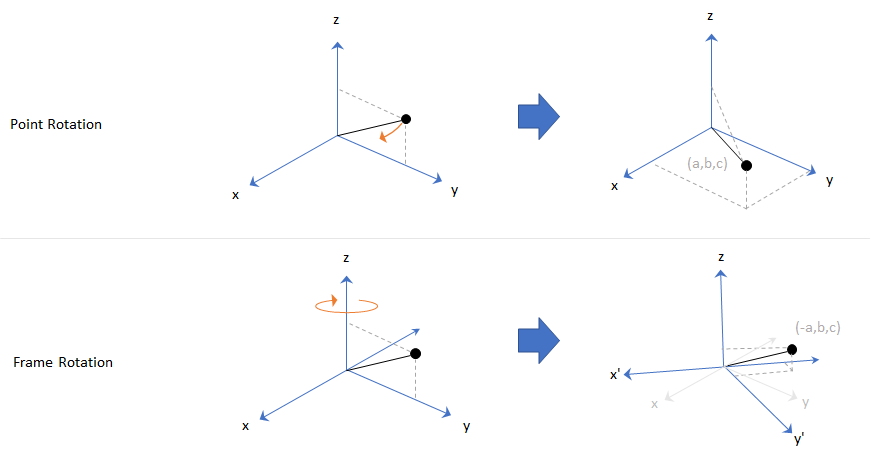
rotationType — Тип вращения'point' | 'frame'Тип вращения в виде 'point' или 'frame'.
Во вращении точки система координат является статической и перемещения точки. Во вращении системы координат точка является статической и перемещения системы координат. Укажите вращение и структурируйте вращение, задают эквивалентные угловые смещения, но в противоположных направлениях.
Типы данных: char | string
