Установите перевод агента, вращение, шкалу
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Sim3D / Ядро Sim3D
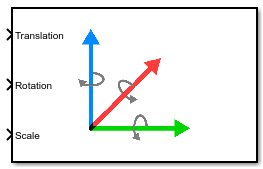
Блок Simulation 3D Actor Transform Set устанавливает перевод агента, вращение и шкалу в 3D среде визуализации.
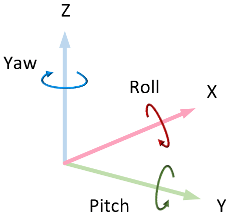
Блок использует зафиксированную транспортным средством систему координат, которая первоначально выравнивается с инерционной системой мировой координаты.
| Ось | Описание |
|---|---|
| X | Передайте направление транспортного средства Крен — вращение, Выполненное правой рукой, вокруг Оси X |
| Y | Расширяет справа от транспортного средства, первоначально найдите что-либо подобное к наземной плоскости Тангаж — вращение, Выполненное правой рукой, вокруг Оси Y |
| Z | Расширяет вверх Рыскание — вращение, Выполненное левой рукой, вокруг оси Z |
Агенты являются объектами сцены, которые поддерживают 3D перевод, вращение и шкалу. Части являются компонентами агента. Компоненты не существуют собой; они сопоставлены с агентом.
Совет
Проверьте, что блок Simulation 3D Actor Transform Set выполняется перед блоком Simulation 3D Scene Configuration. Тем путем Simulation 3D Actor Transform Set готовит данные сигнала, прежде чем Нереальная среда визуализации Engine® 3D получит его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Actor Transform Set — -1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Управления и Отображения.
Simulation 3D Actor Transform Get | Simulation 3D Camera Get | Simulation 3D Scene Configuration | Vehicle Terrain Sensor

