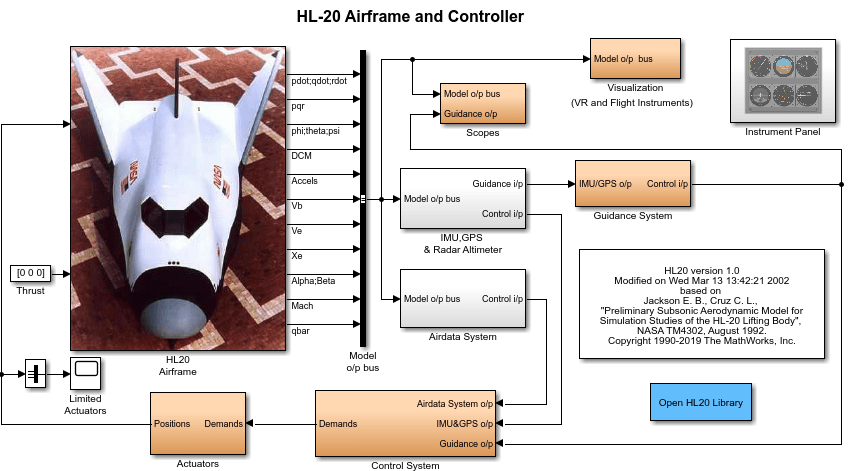
В данном примере моделируется планер подъемного корпуса NASA HL-20, недорогого дополнения к орбитальному аппарату Space Shuttle. HL-20 не запитан, но модель включает в себя как корпус самолета, так и контроллер.
Для большинства конструкций управления полетом необходимо смоделировать, смоделировать и проанализировать планер или модель установки. В идеале этот корпус самолета следует смоделировать быстро, повторно используя блоки или структуру модели, чтобы сократить время проверки и оставить больше времени для проектирования управления. В этом исследовании, программное обеспечение Aerospace Blockset™ эффективно части моделей корпуса HL-20. Остальные части, включая расчет аэродинамических коэффициентов, моделируются с помощью программного обеспечения Simulink ®. В данном примере рассматривается модель планера HL-20 и рассматривается использование аэродинамических данных в модели.
Этот HL-20, также известный как система запуска персонала (PLS), представляет собой подъемный аппарат для повторного ввода кузова, предназначенный для дополнения орбитального аппарата «Спейс шаттл». Изначально он разрабатывался как недорогое решение для выхода на низкую околоземную орбиту и обратно. Он может перевозить до 10 человек и ограниченный груз [1].
Корпус подъемника HL-20 может быть выведен на орбиту либо путем его вертикального запуска ракетами-разгонниками, либо путем его транспортировки в отсеке полезной нагрузки орбитального аппарата «Спейс шаттл». Подъемный кузов HL-20 деорбитируется с помощью небольшой бортовой двигательной установки. Его профиль повторного ввода - носовой, горизонтальный и непотушенный.
Главный вид спереди несущего тела HL-20 (фотография: НАСА Лэнгли)
Конструкция HL-20 имеет ряд преимуществ:
Быстрый поворот между посадкой и запуском снижает эксплуатационные расходы.
У HL-20 исключительная безопасность полетов.
Он может садиться обычно на взлетно-посадочные полосы самолета.
Потенциальные виды использования HL-20 включают:
Орбитальное спасение севших на мель космонавтов
Обмен экипажами Международной космической станции
Миссии по наблюдению
Миссии по спутниковому обслуживанию
Хотя программа HL-20 в настоящее время не активна, аэродинамические данные HL-20 испытаний используются в текущих проектах НАСА [2].
Вы можете открыть корпус HL-20 и модель диспетчера, войдя aeroblk_HL20 в командной строке MATLAB ®.
Предварительные аэродинамические данные для несущего тела HL-20 взяты из документа TM4302 [1] НАСА.
Модель планера включает в себя несколько ключевых допущений и ограничений:
Предполагается, что планер является жестким и имеет постоянную массу, центр тяжести и инерцию, так как модель представляет собой только непотушенную часть миссии.
Предполагается, что HL-20 является латерально симметричным транспортным средством.
Предполагается, что эффекты сжимаемости (Mach) являются незначительными.
Предполагается, что эффективность управления изменяется нелинейно с углом атаки и линейно с углом отклонения. Эффективность управления не зависит от угла боковины.
Нелинейная аэродинамическая модель с шестью степенями свободы является представлением ранней версии HL-20. Поэтому модель не предназначена для реалистичного моделирования производительности более поздних версий HL-20.
Типовая модель планера состоит из ряда компонентов, таких как
Уравнения движения
Экологические модели
Расчет аэродинамических коэффициентов, сил и моментов
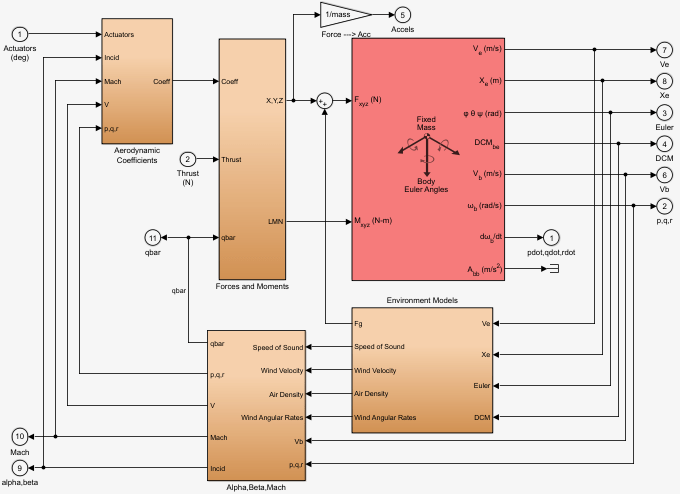
Подсистема планера HL-20 модели содержит пять подсистем, моделирующих типовые компоненты планера:
Подсистема 6DOF (Эйлеровы углы) содержит уравнения движения корпуса самолета с шестью степенями свободы. В подсистеме 6DOF (углов Эйлера) положение тела распространяется во времени с использованием представления угла Эйлера. Эта подсистема является одним из уравнений блоков движения из библиотеки Aerospace Blockset. Также доступно представление кватерниона. Дополнительные сведения об этих блоках см. на страницах ссылок на блоки 6DOF (Euler Angles) и 6DOF (Quaternion).
Подсистема моделей окружающей среды содержит следующие подсистемы и блоки:
Блок Модели Силы тяжести WGS84 осуществляет математическое представление геоцентрического эквипотенциального эллипсоида Мировой Геодезической Системы (WGS84).
Дополнительные сведения об этом блоке см. на странице вхождения блока «Модель силы тяжести» (WGS84 Gravity Model).
Блок модели атмосферы COESA реализует математическое представление стандартных более низких атмосферных значений для абсолютной температуры, давления, плотности и скорости звука Комитета по расширению стандартной атмосферы 1976 года (COESA), учитывая входную геопотенциальную высоту.
Для получения дополнительной информации об этом блоке см. справочную страницу блока модели атмосферы COESA.
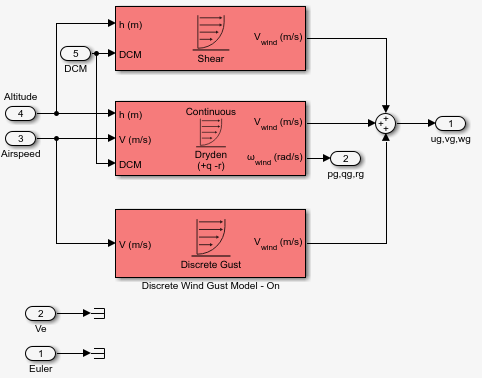
Подсистема моделей ветра содержит следующие блоки:
Блок «Модель сдвига ветра» добавляет сдвиг ветра к модели.
Дополнительные сведения об этом блоке см. на странице вхождения блока Модель сдвига ветра (Wind Shear Model).
Блок дискретной модели порыва ветра реализует порыв ветра стандартной формы «1 - косинус».
Для получения дополнительной информации об этом блоке см. справочную страницу блока Дискретная модель порыва ветра.
Блок Dryden Wind Turbulence Model (Continuous) использует спектральное представление Dryden для добавления турбулентности в аэрокосмическую модель путем пропускания белого шума с ограниченной полосой пропускания через соответствующие формирующие фильтры.
Для получения дополнительной информации об этом блоке см. справочную страницу блока Dryden Wind Turbulence Model (Continuous).
Модели окружающей среды реализуют математические представления в стандартных ссылках, таких как U.S. Standard Atmosphere, 1976.
Экологические модели в модели корпуса HL-20
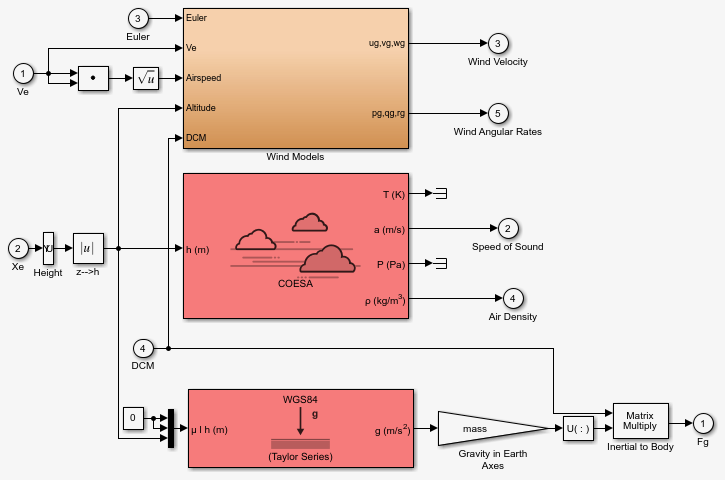
Модели ветра в модели корпуса HL-20
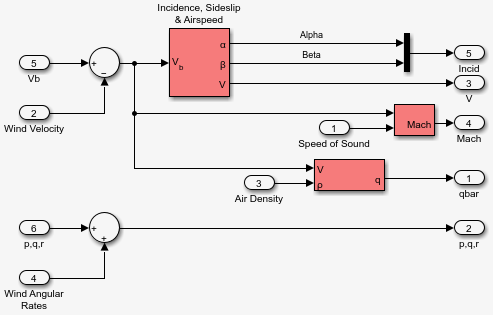
Подсистема Alpha, Beta, Mach вычисляет дополнительные параметры, необходимые для вычисления и поиска аэродинамических коэффициентов. Эти дополнительные параметры включают
Число Маха
Углы падения ()![]()
Скорость полета
Динамическое давление
Подсистема Alpha, Beta, Mach корректирует скорость тела для скорости ветра и корректирует скорость тела для углового ускорения ветра.
Дополнительные вычисленные параметры для модели корпуса HL-20 (альфа, бета, подсистема машины)
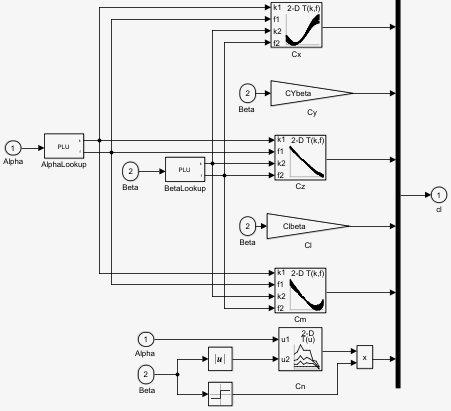
Подсистема «Аэродинамические коэффициенты» содержит аэродинамические данные и уравнения для вычисления шести аэродинамических коэффициентов, которые реализованы по ссылке [1]. Далее следуют шесть аэродинамических коэффициентов.
| Cx | Коэффициент осевого усилия |
| Сай | Коэффициент боковой силы |
| Cz | Коэффициент нормальной силы |
| Статья | Коэффициент скользящего момента |
| Cm | Коэффициент качающегося момента |
| Cn | Коэффициент момента рыскания |
Эффекты земли и шасси в эту модель не включены.
Вклад каждого из этих коэффициентов вычисляется в подсистемах (скорость тела, приращение исполнительного механизма и опорный элемент), а затем суммируется и передается в подсистему Силы и Моменты.
Аэродинамические коэффициенты в модели корпуса HL-20
Аэродинамические данные были собраны в результате испытаний в аэродинамической трубе, в основном на масштабированных моделях предварительной дозвуковой аэродинамической модели HL-20. Данные подгонялись по кривой, и большая часть аэродинамических коэффициентов описывается полиномиальными функциями угла атаки и угла бокового скольжения. Подробные сведения об аэродинамических данных и уменьшении объема данных приведены в [1 ].
Полиномиальные функции, содержащиеся в aeroblk_init_hl20.m используются для вычисления таблиц подстановки, используемых функцией предварительной загрузки модели. Таблицы подстановки заменяют полиномиальные функции. В зависимости от порядка и реализации функции использование таблиц поиска может быть более эффективным, чем пересчет значений на каждом временном шаге с функциями. Для дальнейшего повышения эффективности большинство таблиц реализуются как поиск и интерполяция индекса предварительного поиска (n-D) с использованием блоков предварительного поиска. Эти блоки в наибольшей степени повышают производительность при наличии в модели нескольких таблиц с идентичными точками останова. Эти блоки уменьшают количество операций поиска точки останова в модели на данном шаге времени. После заполнения таблиц функцией предварительной нагрузки можно вычислить аэродинамический коэффициент.
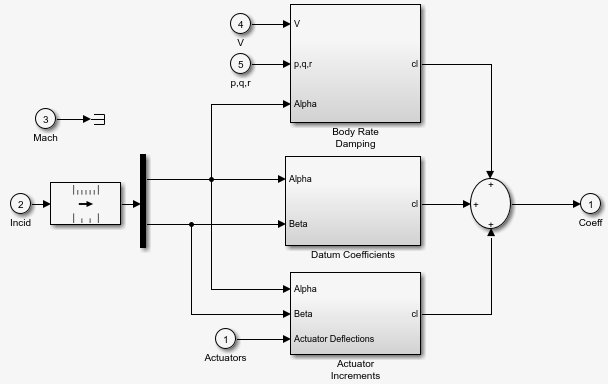
Уравнения для вычисления шести аэродинамических коэффициентов делятся между тремя подсистемами:
Суммируя базовые коэффициенты, демпфирование частоты тела и приращения исполнительного механизма, подсистема выдает шесть аэродинамических коэффициентов, используемых для вычисления сил и моментов планера [1].
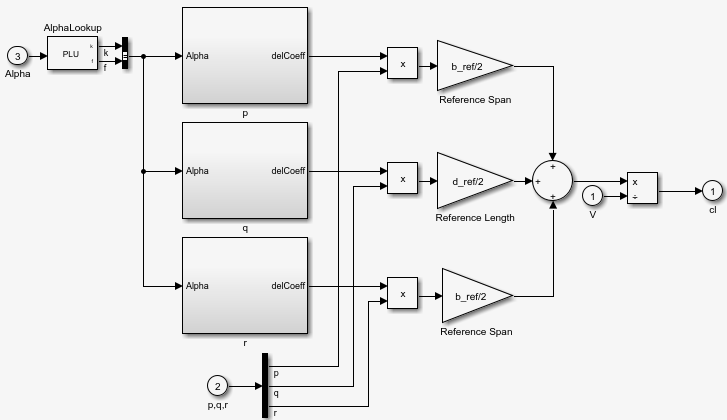
Подсистема опорных коэффициентов. Подсистема опорных коэффициентов вычисляет коэффициенты для базовой конфигурации без отклонения управляющей поверхности. Эти базовые коэффициенты зависят только от углов падения тела.
Подсистема демпфирования скорости тела. Производные динамического движения вычисляются в подсистеме демпфирования скорости тела.
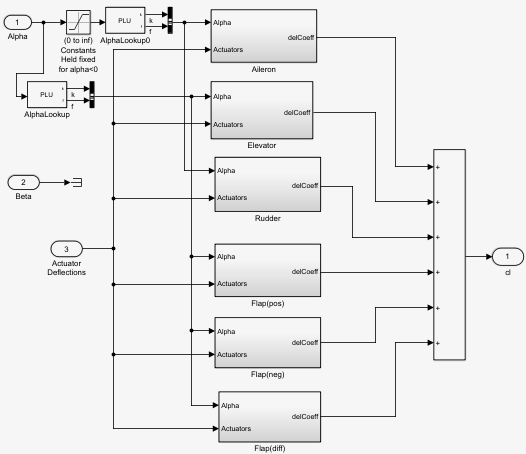
Подсистема приращения привода. Таблицы поиска определяют инкрементные изменения коэффициентов из-за отклонений управляющей поверхности в подсистеме приращения исполнительного механизма. К имеющимся управляющим поверхностям относятся симметричные крылышки (лифт), дифференциальные крылышки (элероны), положительные створки кузова, отрицательные створки кузова, дифференциальные створки кузова и цельносъемный руль.
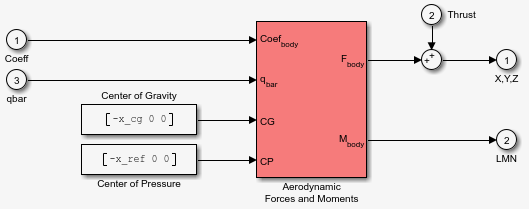
Подсистема сил и моментов. Подсистема Силы и моменты вычисляет силы тела и моменты тела, действующие на планер вокруг центра тяжести. Эти силы и моменты зависят от аэродинамических коэффициентов, тяги, динамического давления и эталонных параметров планера.
Эти проверенные подсистемы завершают HL-20 планер. Следующим шагом в процессе проектирования управления полетом является анализ, обрезка и линеаризация HL-20 планера так, чтобы для него можно было разработать систему управления полетом. Вы можете увидеть пример автоматического управления полетом для HL-20 планера в aeroblk_HL20 пример.
[1] Джексон, E. B. и К. Л. Крус, «Предварительная дозвуковая аэродинамическая модель для исследований моделирования несущего тела HL-20», (август 1992) NASA TM4302.
Этот документ включен в несущее тело HL-20 .zip доступен в MATLAB Central.
[2] Морринг, Ф., младший, Исследование «Спасательная шлюпка МКС включает ПЗВ», Неделя авиации и космических технологий (20 мая 2002 года).