Синхронный двигатель постоянного магнита на основе потока
Блок силового агрегата/движитель/электродвигатели и инверторы
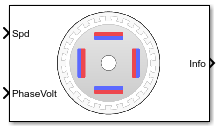
Блок PMSM на основе потока реализует трехфазный синхронный двигатель постоянного магнита на основе потока (PMSM) с электродвижущей силой на основе таблицы. Блок использует трехфазные входные напряжения для регулирования индивидуальных фазных токов, что позволяет регулировать крутящий момент или частоту вращения двигателя.
Модели двигателей на основе потока учитывают магнитное насыщение и потери железа. Для расчета магнитного насыщения и потерь железа блок PMSM на основе потока использует обратную связь потока. Для получения параметров блока можно использовать конечноэлементный анализ (МКЭ) или измерять фазовые напряжения с помощью динамометра.
По умолчанию блок устанавливает для параметра «Тип моделирования» значение Continuous для использования непрерывного времени выборки во время моделирования. Если требуется создать код для целей с двойной и одинарной точностью с фиксированным шагом, рекомендуется установить для параметра значение Discrete. Затем укажите параметр Sample Time, Ts.
Чтобы включить вычисления потерь мощности, подходящие для целей генерации кода, ограничивающих объем памяти, выберите Включить оптимизированную память 2D LUT.
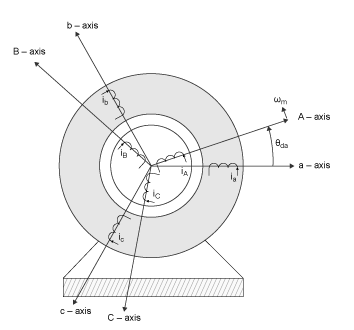
Блок реализует уравнения, которые выражены в неподвижном опорном (dq) кадре ротора. Ось d выравнивается по оси A. Все величины в системе отсчета ротора относятся к статору.
Блок использует эти уравнения.
| Вычисление | Уравнение |
|---|---|
| q- и d-осевое напряжение | |
| q- и d-осевой ток | («d», «q») |
| Электромеханический крутящий момент | [ |
Уравнения используют эти переменные.
|
ωm |
Механическая частота вращения ротора |
|
ωe | Электрическая частота вращения ротора |
|
Θda |
dq электрический угол статора относительно оси а ротора |
|
Rs, Rr |
Сопротивление обмоток статора и ротора соответственно |
|
iq, id |
q- и d-осевой ток соответственно |
|
vq, vd |
q- и d-осевое напряжение соответственно |
| Λ q, Λ d |
магнитный поток по оси q- и d соответственно |
|
P |
Количество пар полюсов |
|
Те |
Электромагнитный момент |
Для вычисления напряжений и токов в сбалансированных трехфазных (a, b) величинах, квадратурных двухфазных (α, β) величинах и вращающихся (d, q) опорных кадрах блок использует преобразования Кларка и Парка.
В уравнениях преобразования.
starte
| Преобразовать | Описание | Уравнения |
|---|---|---|
|
Кларк |
Преобразует сбалансированные трехфазные величины (a, b) в сбалансированные двухфазные квадратурные величины (α, β). | 32xc |
|
Парк |
Преобразует сбалансированные двухфазные ортогональные стационарные величины (α, β) в ортогональный вращающийся опорный кадр (d, q). | xβcosstarte |
|
Обратный Кларк |
Преобразует сбалансированные двухфазные квадратурные величины (α, β) в сбалансированные трехфазные величины (a, b). | − 32xβ |
|
Обратный парк |
Преобразует ортогональный вращающийся опорный кадр (d, q) в сбалансированные двухфазные ортогональные стационарные величины (α, β). | xqcosstarte |
Преобразования используют эти переменные.
| ωm |
Механическая частота вращения ротора |
| P |
Пары полюсов двигателя |
| ωe |
Электрическая частота вращения ротора |
| Θe |
Электрический угол ротора |
| x |
Фазный ток или напряжение |
Угловая скорость ротора определяется:
) d
Уравнения используют эти переменные.
J | Комбинированная инерция ротора и нагрузки |
F | Комбинированное вязкое трение ротора и нагрузки |
θm | Механическое угловое положение ротора |
TM | Крутящий момент вала ротора |
Те | Электромагнитный момент |
Tf | Комбинированный момент трения ротора и нагрузки |
ωm | Механическая частота вращения ротора |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая мощность | Pmot | startmTe |
PwrBus | Электроэнергия | Pbus | vcnic | ||
|
| PwrElecLoss | Потеря резистивной мощности | Pelec | Rsisq2) | |
PwrMechLoss | Потеря механической мощности | Pmech | Если для параметра Port Configuration установлено значение startm 'Tf) Если для параметра Port Configuration установлено значение 0 | ||
|
| PwrMtrStored | Накопленная мощность двигателя | Pstr | Pmech | |
Уравнения используют эти переменные.
RS | Сопротивление статора |
ia, ib, ic | Статорный ток фаз a, b и c |
isq, isd | Токи q- и d-оси статора |
фургон, vbn, vcn | Напряжение фазы a, b и c статора |
ωm | Угловая механическая скорость ротора |
F | Комбинированный двигатель и вязкое демпфирование нагрузки |
Те | Электромагнитный момент |
Tf | Комбинированный момент трения двигателя и нагрузки |
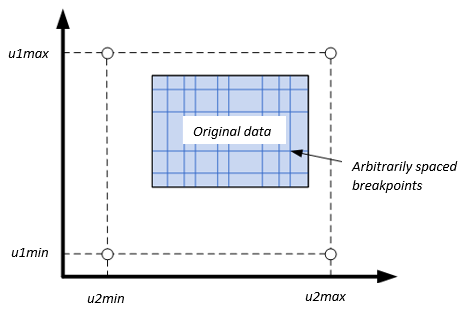
Данные для Соответствующих токов d-оси, id и Соответствующих токов q-оси, таблиц поиска iq являются функциями потока d-оси и q-оси.
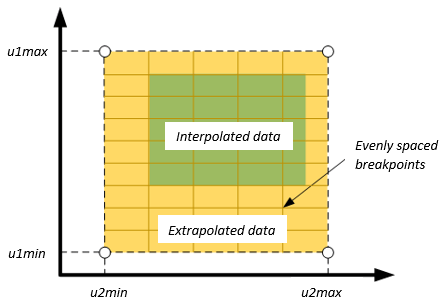
Чтобы включить текущие вычисления, подходящие для целей создания кода, ограничивающих объем памяти, выберите Включить оптимизированную память 2D LUT. Блок использует линейную интерполяцию для оптимизации текущих значений таблицы поиска для генерации кода. В этой таблице приводится сводная информация о реализации оптимизации.
| Сценарий использования | Внедрение | |
|---|---|---|
Поток d- и q-оси выравнивается со значениями точки останова таблицы поиска. | Ток, оптимизированный для памяти, является текущим значением таблицы поиска на пересечении значений потока. | |
Поток по осям d- и q не выравнивается со значениями точки останова таблицы поиска, но находится в пределах диапазона. | Ток, оптимизированный для памяти, представляет собой линейную интерполяцию между соответствующими значениями потока. | |
Поток по осям d- и q не выравнивается со значениями точки останова таблицы поиска и выходит за пределы диапазона. | Не удается вычислить ток, оптимизированный для памяти. Блок использует экстраполированные данные. | |
Таблицы поиска, оптимизированные для создания кода, не поддерживают экстраполяцию данных, находящихся вне допустимого диапазона. Однако предварительно рассчитанные значения экстраполяции можно включить в таблицу поиска потерь мощности, выбрав команду Указать экстраполяцию (Specify Extrapolation).
Блок использует параметры конечной точки для изменения размера табличных данных.
| Ввод данных пользователем | Экстраполяция |
|---|---|
|
|
[1] Ху, Дакай, Язан Алсмади и Лунъя Сюй. «Высокоточное нелинейное моделирование IPM на основе измеренной связи потока обмотки статора». Транзакции IEEE ® по отраслевым приложениям, том 51, № 4, июль/август 2015 г.
[2] Чэнь, Сяо, Цзябинь Ван, Бхаскар Сен, Панагиотис Ласари, Тяньфу Сунь. «Модель высокой точности и вычислительной эффективности для внутренних машин с постоянными магнитами, учитывающая магнитное насыщение, пространственную гармонику и эффект потерь железа». IEEE Transactions on Industrial Electronics, том 62, № 7, июль 2015 года.
[3] Оттоссон, Дж., М. Алакула. «Компактная реализация контроллера ослабления поля». Международный симпозиум по силовой электронике, электрическим приводам, автоматизации и движению, июль 2006 года.
Контроллер PM на основе потока | Асинхронный двигатель | Внутренняя PMSM | Сопоставленный двигатель | Поверхностное крепление PMSM