Демодуляция PSK-модулированных данных
Набор средств связи/модуляция/цифровая модуляция основной полосы частот/PM
Коммуникационный инструментарий Поддержка HDL/Модуляция/PM
Блок M-PSK демодулятора основной полосы частот демодулирует представление основной полосы частот сигнала, модулированного PSK. Порядок модуляции, M, эквивалентен количеству точек в созвездии сигналов и определяется параметром M-ary числа. Блок принимает скалярные или столбчатые векторные входные сигналы.
Типы данных | |
Многомерные сигналы |
|
Сигналы переменного размера |
|
Только М = 2, 4, 8. [b] Входы с фиксированной точкой должны быть подписаны. [c] Когда ASIC/FPGA выбран на панели реализации аппаратных средств, выходные данные - ufix (1) для битовых выходов и ufix (ceil (log2 (M)) для целочисленных выходов. | |
Далее следуют диаграммы демодуляции сигналов BPSK с жестким решением.
Диаграмма сигналов демодулятора BPSK с жестким решением для тривиального фазового сдвига (кратное δ/2)
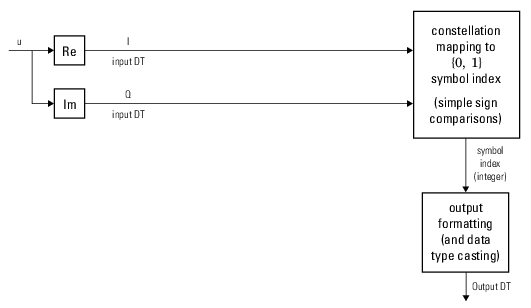
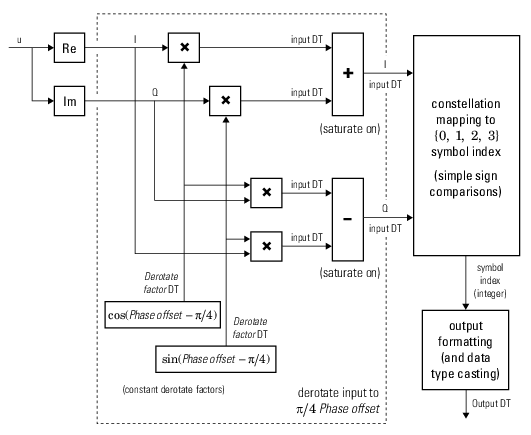
Диаграмма сигнала с плавающей запятой демодулятора BPSK с жестким решением для нетривиального фазового сдвига
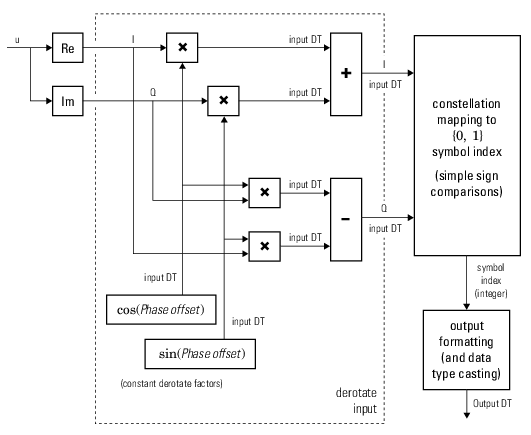
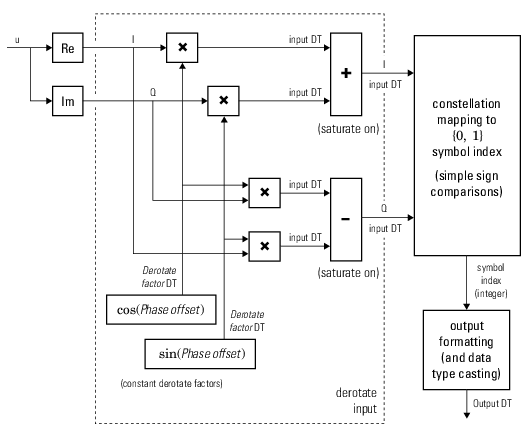
Диаграмма сигнала фиксированной точки демодулятора BPSK с жестким решением для нетривиального фазового сдвига
Далее следуют диаграммы демодуляции сигналов QPSK с жестким решением.
Диаграмма сигналов демодулятора QPSK с жестким решением для тривиального фазового сдвига (нечетное кратное δ/4)
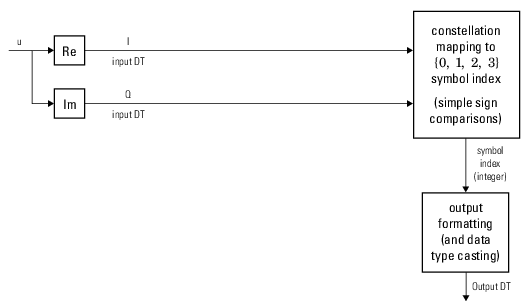
Диаграмма сигнала с плавающей запятой демодулятора QPSK с жестким решением для нетривиального фазового сдвига

Схема сигнала фиксированной точки демодулятора QPSK с жестким решением для нетривиального фазового сдвига
Далее следуют схемы демодуляции сигналов высокого порядка (М ≥ 8) с жестким решением.
Диаграмма сигналов с плавающей запятой демодулятора с жестким решением 8-PSK
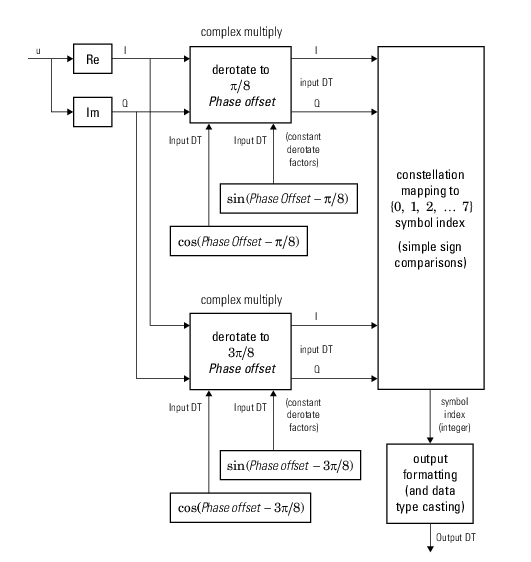
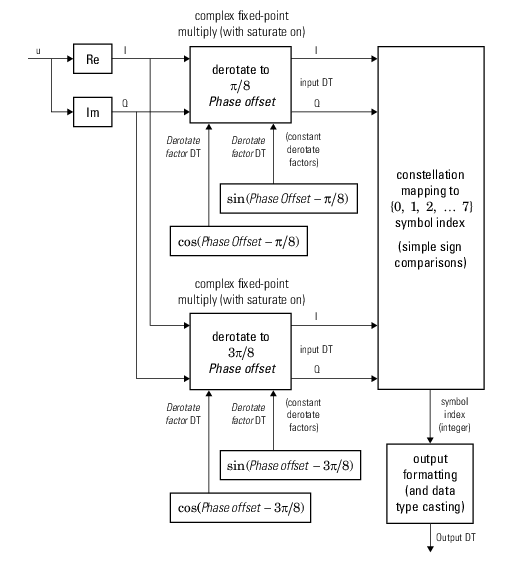
Схема сигнала фиксированной точки демодулятора жесткого решения 8-PSK
Демодулятор M-PSK с жестким решением (M > 8) Диаграмма сигналов с плавающей запятой для нетривиального фазового сдвига
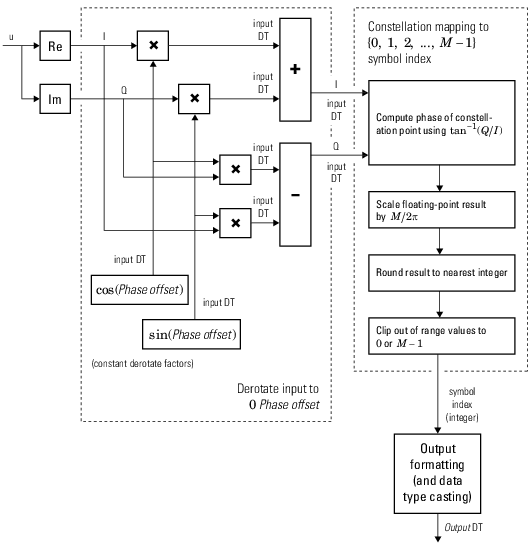
Для M > 8, чтобы улучшить скорость и затраты на реализацию, не выполняется арифметика деротации, когда фазовое смещение равно 0, , или (то есть когда оно тривиально).
Кроме того, для M > 8 этот блок поддерживает только double и single типы ввода.

