Правильный сдвиг синхросигналов символов
Набор средств связи/синхронизация
Блок синхронизатора символов корректирует сдвиг синхросигналов символов для схем модуляции PAM, PSK, QAM или OQPSK между передатчиком с одной несущей и приемником. Дополнительные сведения см. в разделе Обзор синхронизации символов.
Примечание
Входной сигнал работает на основе частоты дискретизации, в то время как выходной сигнал работает на основе скорости передачи символов.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Алгоритм синхронизатора синхронизации символов основан на алгоритме ФАПЧ, который состоит из четырех компонентов:
Детектор ошибок синхронизации (TED)
Делающий интерполяции
Контроллер интерполяции
Фильтр контура
Для модуляции OQPSK синфазная и квадратурная составляющие сигнала сначала выравниваются (как в модуляции QPSK) с использованием буфера состояния для кэширования последней половины символа предыдущего входа. После начального выравнивания оставшийся процесс синхронизации будет таким же, как для модуляции QPSK.
На этой блок-схеме показан пример синхронизатора синхронизации. На чертеже синхронизация символа PLL действует на x (t), принятый сигнал выборки после согласованной фильтрации. Синхронизирующий сигнал символа ФАПЧ выдает сигнал символа
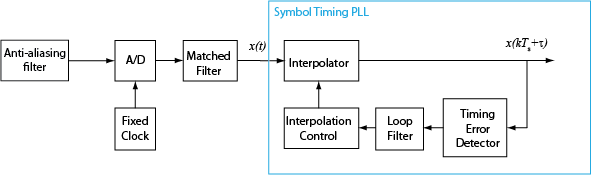
Временная задержка оценивается по выборкам с фиксированной скоростью согласованного фильтра, которые асинхронны со скоростью передачи символов. Поскольку результирующие выборки не выровнены с границами символов, для «перемещения» выборок используется интерполятор. Поскольку временная задержка неизвестна, интерполятор должен быть адаптивным. Кроме того, поскольку интерполятор представляет собой линейную комбинацию имеющихся выборок, его можно рассматривать как выходной сигнал фильтра.
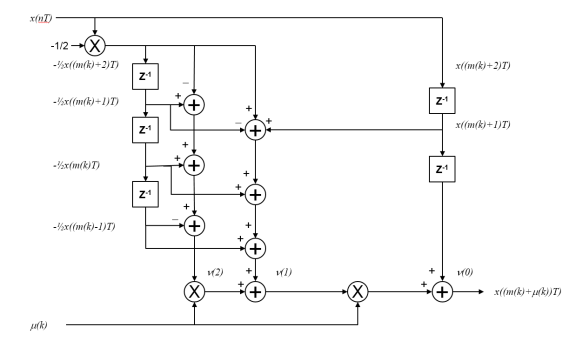
Интерполятор использует кусочно-параболический интерполятор со структурой Фэрроу и коэффициентом α, установленным в 1/2 (см. Rice, Michael, Digital Communications: A Discrete-Time Approach).
Управление интерполяцией обеспечивает интерполятор индексом базовой точки и дробным интервалом. Индекс базовой точки - это индекс выборки, ближайший к интерполятору. Дробный интервал - это отношение времени между интерполятором и индексом его базовой точки и интервалом интерполяции.
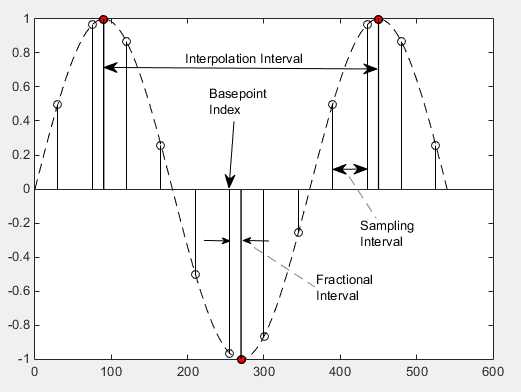
Интерполяция выполняется для каждого образца, и стробирующий сигнал используется для определения того, выведен ли интерполятор. Синхронизатор использует управление интерполяцией счетчика по модулю 1 для обеспечения строба и дробного интервала для использования с интерполятором.
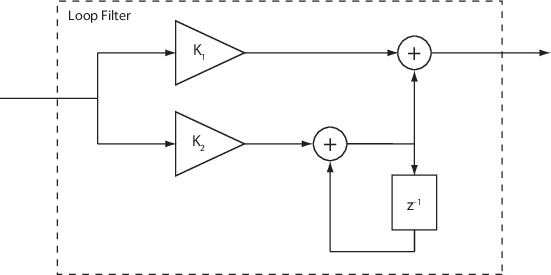
Синхронизатор использует фильтр контура интегратора пропорционального плюс (PI). Пропорциональный коэффициент усиления, K1 и коэффициент усиления интегратора, K2, вычисляются с помощью
и
Kp.
Промежуточное условие,
14,
где:
N - количество выборок на символ.
start- коэффициент демпфирования.
BnTS - нормализованная полоса пропускания шлейфа.
Kp - коэффициент усиления детектора.
[1] Райс, Майкл. Цифровая связь: дискретно-временной подход. Река Верхнее Седло, Нью-Джерси: Прентис Холл, 2008.
[2] Менгали, Умберто и Альдо Н. Д'Андреа. Методы синхронизации для цифровых приемников. Нью-Йорк: Пленум Пресс, 1997.


