В Toolbox™ системы управления PID-тюнер предоставляет графики ответа системы и другие инструменты для настройки PID-контроллеров для установок, представленных моделями LTI.
Сведения об анализе в PID-тюнере с моделями Simulink ® см. в разделе Анализ конструкции в PID-тюнере (Simulink Control Design).
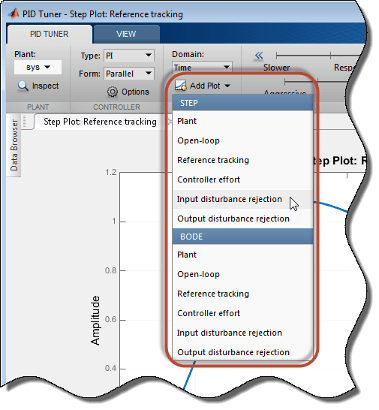
Чтобы определить, соответствует ли конструкция компенсатора вашим требованиям, можно проанализировать отклик системы с помощью графиков откликов. На вкладке PID Tuner выберите график ответа в меню Add Plot. Меню Добавить график (Add Plot) также позволяет выбрать из нескольких графиков шага (отклик во временной области) или графика Боде (отклик в частотной области).
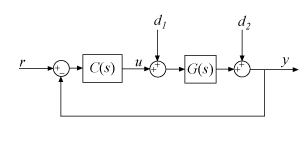
Для 1-DOF типов PID-контроллеров, таких как PI, PIDF и PDF, программное обеспечение вычисляет системные ответы на основе следующей одноконтурной архитектуры управления, где G - указанное оборудование, а C - PID-контроллер:
Для 2-DOF типов контроллеров PID, таких как PI2, PIDF2 и I-PD, программное обеспечение вычисляет ответы на основе следующей архитектуры:
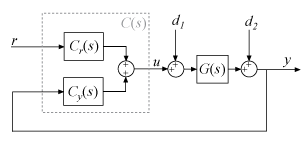
Системные ответы основаны на разложении диспетчера PID с 2 финансовыми департаментами, К, в компонент заданного значения Cr и компонент обратной связи Сай, как описано в Двух Диспетчерах PID Степени свободы.
В следующей таблице суммированы доступные ответы для графиков анализа. (Для установок обработки данных с частотным откликом, таких как frd модели, графики ответов во временной области недоступны.)
| Ответ | Печатаемая система (1-DOF) | Печатаемая система (2-DOF) | Описание |
|---|---|---|---|
Plant | G | G | Реакция завода. Используйте для изучения динамики завода. |
Open-loop | GC | -GCy | Отклик системы контроллер-установка с разомкнутым контуром. Используется для проектирования частотной области. Используется в тех случаях, когда в спецификации проекта включены критерии надежности, такие как запас усиления в разомкнутом контуре и запас фазы. |
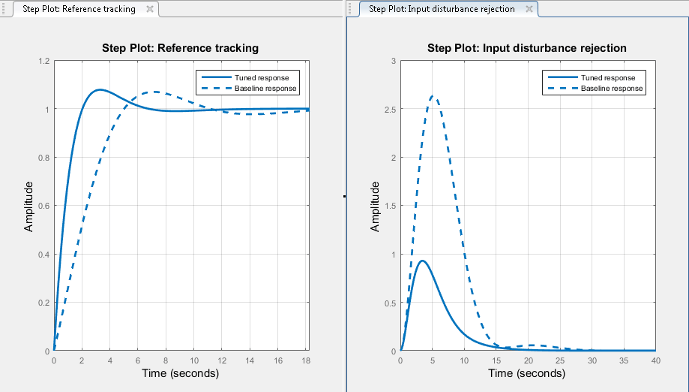
Reference tracking | GC (от r до y) | GCy (от r до y) | Реакция системы с замкнутым контуром на шаговое изменение уставки. Используйте, если проектные спецификации включают отслеживание уставок. |
Controller effort | GC (от r до u) | GCy (от r до u) | Выходной отклик контроллера с замкнутым контуром на шаговое изменение уставки. Используйте, когда конструкция ограничена практическими ограничениями, такими как насыщенность контроллера. |
Input disturbance rejection | GC (от d1 до y) | GCy (от d1 до y) | Реакция системы с замкнутым контуром на нарушение нагрузки (ступенчатое нарушение на входе в установку). Используется в тех случаях, когда проектные спецификации включают отклонение входных возмущений. |
Output disturbance rejection | GC (от d2 до y) | GCy (от d2 до y) | Реакция системы с замкнутым контуром на ступенчатое нарушение на выходе из установки. Используется для анализа чувствительности к ошибкам моделирования. |
Если вы определили базовый контроллер, то по умолчанию PID Tuner отображает как ответы с использованием текущего проекта PID Tuner, так и ответы с использованием базового контроллера.
Существует два способа определения контроллера базовой линии:
Загрузка контроллера базовой линии при открытии PID-тюнера с использованием синтаксиса pidTuner(sys,C0).
Сделать текущую конструкцию PID-тюнера контроллером базовой линии в любое время, щелкнув стрелку «Экспорт![]() » и выбрав
» и выбрав Save as Baseline.
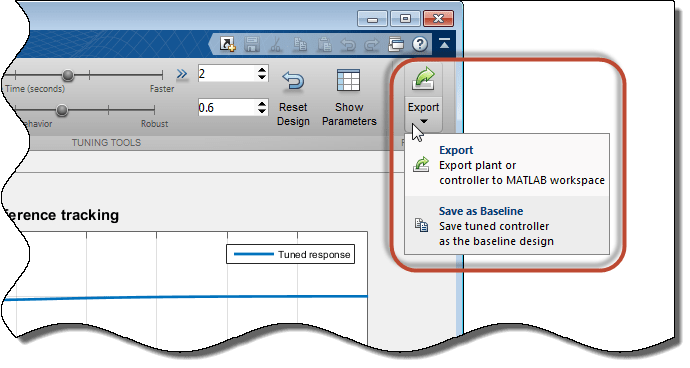
При этом текущий отклик Tuned становится откликом Baseline. Дальнейшая корректировка текущей конструкции создает новую строку ответа Tuned.
Чтобы скрыть ответ опорной структуры, щелкните![]() Параметры и снимите флажок Показать данные контроллера опорной структуры.
Параметры и снимите флажок Показать данные контроллера опорной структуры.
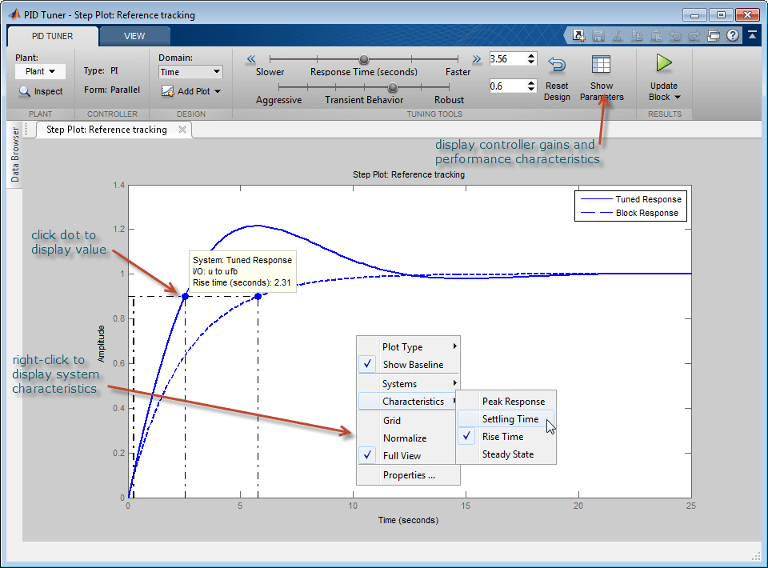
Можно просмотреть значения для системных характеристик, таких как пиковый отклик и запас усиления, либо:
Непосредственно на графике ответа - используйте контекстное меню для добавления характеристик, которые отображаются как синие маркеры. Затем щелкните левой кнопкой мыши маркер для отображения соответствующей панели данных.
В таблице Производительность и надежность - чтобы отобразить эту таблицу, щелкните![]() Показать параметры.
Показать параметры.
Если реакция первоначальной конструкции контроллера не соответствует вашим требованиям, можно в интерактивном режиме скорректировать конструкцию. PID-тюнер предоставляет два параметра домена для уточнения конструкции контроллера:
Time domain (по умолчанию) - используйте ползунок Response Time, чтобы сделать отклик системы управления по замкнутому циклу быстрее или медленнее. Используйте ползунок Transient Behavior (Переходное поведение), чтобы сделать контроллер более агрессивным при отклонении возмущений или более надежным против неопределенности установки.
Frequency - Используйте ползунок Bandwidth, чтобы сделать отклик системы управления по замкнутому контуру быстрее или медленнее (время отклика 2/wc, где wc - полоса пропускания). Используйте ползунок Phase Margin, чтобы сделать контроллер более агрессивным при отклонении возмущений или более устойчивым к неопределенности установки.
В обоих режимах существует компромисс между эталонным отслеживанием и характеристикой отклонения возмущений. Пример, показывающий, как использовать ползунки для настройки этого компромисса, см. в разделе Настройка контроллера PID на отслеживание ссылок или отклонение нарушений (PID-тюнер).
Совет
Чтобы вернуться к начальной конструкции контроллера после перемещения ползунков, щелкните![]() Сбросить конструкцию (Reset Design).
Сбросить конструкцию (Reset Design).
