Работа с моделями более низкого порядка может упростить анализ и управление конструкцией относительно моделей более высокого порядка. Более простые модели также легче понять и манипулировать. Модели высокого порядка, полученные линеаризацией сложных моделей Simulink ® или из других источников, могут содержать состояния, которые мало способствуют динамике, представляющей особый интерес для вашего приложения. Поэтому может быть полезно уменьшить порядок моделей при сохранении характеристик модели, важных для приложения .
Случаи, в которых может потребоваться сократить заказ модели, включают следующие ситуации:
Вы работаете с моделью относительно высокого порядка, полученной путем линеаризации модели Simulink, выполнения вычисления конечных элементов, соединения элементов модели или другого источника.
Требуется повысить скорость моделирования модели Simulink в определенной рабочей точке. В этом случае можно провести линеаризацию части модели в этой рабочей точке и вычислить упрощение или аппроксимацию линеаризованной модели с уменьшенным порядком. Затем можно заменить часть модели блоком LTI, содержащим модель уменьшенного порядка.
Вы проектируете контроллер высокого порядка, который вы хотите реализовать как контроллер низкого порядка, например, контроллер PID. Например, конструкция контроллера, использующая линейно-квадратично-гауссовы методы или методы синтеза H∞, может дать результат высокого порядка. В этом случае можно попытаться уменьшить порядок установки перед синтезом, уменьшить порядок контроллера после синтеза или и то и другое.
Требуется упростить модель, полученную путем идентификации с помощью программного обеспечения System Identification Toolbox™.
Следующая диаграмма иллюстрирует взаимосвязь между уменьшением модели и конструкцией управления.
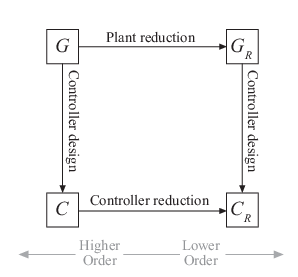
В общем, при проектировании контроллера для системы, представленной моделью высокого порядка, G, полезно начинать с упрощения модели установки. Затем спроектируйте относительно низкоупорядоченный контроллер CR для модели GR завода более низкого порядка. После проектирования контроллера для исходной или сокращенной модели завода можно попытаться уменьшить контроллер.
Уменьшение установки или контроллера может включать в себя:
Отбрасывание состояний, которые не способствуют динамике системы, таких как структурно разъединенные состояния или отмена пар полюс-ноль.
Отбрасывание низкоэнергетических состояний, которые относительно мало способствуют динамике системы.
Сосредоточение внимания на конкретной частотной области и отбрасывание динамики за пределами этой области. Например, если полоса пропускания управления ограничена динамикой исполнительного механизма, отбросьте динамику более высоких частот.
В любом случае при сокращении порядка модели необходимо сохранить характеристики модели, важные для приложения. При каждом вычислении модели с уменьшенным порядком убедитесь, что модель с уменьшенным порядком сохраняет поведение во временной или частотной области. Например, для конструкции управления полезно проверить, что уменьшенная система с замкнутым контуром является стабильной. Также полезно проверить, что уменьшенная функция передачи CRGR с разомкнутым контуром адекватно соответствует исходным моделям, где коэффициент усиления GC с разомкнутым контуром близок к 1 (в области пересечения коэффициента усиления).
Система управления Toolbox™ предлагает инструменты для уменьшения модели в нескольких средах. К ним относятся:
Функции для выполнения сокращения модели в командной строке MATLAB ®, в сценариях или в собственных функциях .
Сократите задачу «Заказ модели» для создания кода в интерактивном редакторе. При работе с живым сценарием используйте эту задачу для интерактивного экспериментирования с методами и параметрами сокращения модели и создания кода для живого сценария.
Приложение «Редуктор модели» - автономное приложение, позволяющее импортировать модели из рабочей области MATLAB и интерактивно создавать модели уменьшенного порядка с использованием различных методов и параметров. Приложение также может генерировать код для использования в сценарии или функции MATLAB.
Чтобы уменьшить порядок модели, можно либо упростить модель, либо вычислить приближение более низкого порядка. В следующей таблице обобщены различия между несколькими модельными подходами к сокращению.
| Подход | Командная строка | Задача «Приложение» «Редуктор модели» «и» «Сокращение» «» Редактор заказа модели в реальном времени |
|---|---|---|
| Упрощение - точно уменьшите порядок модели, отменив пары полюс-ноль или исключив состояния, которые не влияют на общую реакцию модели | Метод упрощения полюсов-нулей - устранение:
| |
| Аппроксимация (Approximation) - вычисление аппроксимации модели более низкого порядка. | balred - Отбрасывать состояния, которые оказывают относительно низкое влияние на общий отклик модели. | Метод сбалансированного усечения - отбрасывает состояния, которые оказывают относительно низкое влияние на общий отклик модели. |
| Выбор режима (Mode Selection) - исключение полюсов и нулей, которые выходят за пределы заданного диапазона частот. | freqsep - Разделение модели на медленную и быструю динамику вокруг заданной частоты отсечки. | Метод выбора режима - выбор интересующего диапазона частот и отбрасывание динамики за пределы этого диапазона. |
Иногда аппроксимация может дать лучшие результаты, даже если модель выглядит как хороший кандидат на упрощение. Например, модели с отменой около полюса-нуля иногда лучше сокращаются аппроксимацией, чем упрощением. Аналогично, использование balred для уменьшения состояния модели пространства могут дать более точные результаты, чем minreal.
При использовании модели с уменьшенным порядком всегда проверяйте, что упрощение или аппроксимация сохраняет характеристики модели, важные для приложения. Например, сравните частотные характеристики исходной и уменьшенной моделей, используя bodeplot или sigmaplot. Или сравните отклики с разомкнутым контуром для исходных и уменьшенных моделей установки и контроллера.
