Установите минимальный стандарт для отклонения ступенчатых возмущений при использовании тюнера системы управления.
Используйте команду Цель отклонения шага (Step Rejection Goal), чтобы указать, как нарушение шага, введенное в указанном месте системы управления, влияет на сигнал в указанном месте вывода.
Можно задать требуемый отклик в терминах временной области пикового значения, времени установки и коэффициента демпфирования. Тюнер системы управления пытается сделать фактическое отклонение, по крайней мере, таким же хорошим, как и требуемый ответ. Можно также указать отклик как стабильную ссылочную модель, имеющую коэффициент усиления постоянного тока. В этом случае цель настройки состоит в том, чтобы отвергнуть возмущение, а также или лучше, чем эталонная модель.
Чтобы задать отклонение возмущений в соответствии с профилем затухания в частотной области, используйте Цель отклонения возмущений.
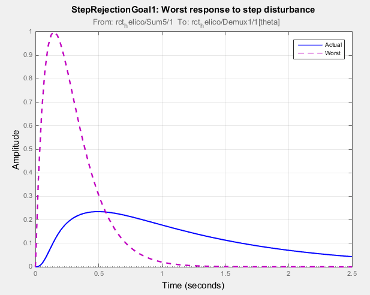
При создании цели настройки в настройщике системы управления создается график цели настройки. Пунктирная линия показывает заданный целевой отклик шага. Сплошная линия - это текущий соответствующий отклик системы.
На вкладке Настройка тюнера системы управления выберите Новая цель > Отклонение нарушения шага для создания цели отклонения шага.
При настройке систем управления в командной строке используйте TuningGoal.StepRejection для указания цели ответа на шаг.
Этот раздел диалогового окна используется для задания точек ввода, вывода и открытия цикла для оценки цели настройки.
Указать входы ступенчатых возмущений
Выберите одно или несколько расположений сигнала в модели, в которых следует применить входной сигнал. Чтобы ограничить отклик SISO, выберите однозначный входной сигнал. Например, для ограничения реакции на ступенчатое возмущение из местоположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'u'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением.
Укажите выходные данные ответа на шаг
Выберите одно или несколько расположений сигналов в модели, в которых будет измеряться реакция на помехи шага. Чтобы ограничить отклик SISO, выберите выходной сигнал с одним значением. Например, чтобы ограничить отклик переходного процесса из расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением. Для систем MIMO количество выходов должно равняться количеству входов.
Вычислить ответ, открыв следующие циклы
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Этот раздел диалогового окна используется для задания формы требуемой реакции на ступенчатое возмущение. Тюнер системы управления пытается сделать фактический отклик, по меньшей мере, таким же хорошим, как и требуемый отклик.
Характеристики ответа
Укажите требуемый отклик с точки зрения характеристик временной области. Введите максимальную амплитуду, максимальное время установки и минимальную постоянную демпфирования в текстовые поля.
Ссылочная модель
Укажите требуемый отклик с точки зрения ссылочной модели.
Введите имя ссылочной модели в рабочем пространстве MATLAB ® в текстовом поле Ссылочная модель (Reference Model). Либо введите команду для создания подходящей ссылочной модели, например: tf([1 0],[1 1.414 1]).
Эталонная модель должна быть стабильной и иметь нулевой коэффициент усиления постоянного тока. Модель может быть непрерывной или дискретной. Если модель дискретна, она может включать временные задержки, которые рассматриваются как полюса при z = 0.
Для достижения наилучших результатов эталонная модель и отклик разомкнутого контура от возмущения к выходному сигналу должны иметь одинаковые коэффициенты усиления на частоте, где коэффициент усиления эталонной модели достигает пика.
Этот раздел диалогового окна используется для определения дополнительных признаков цели отклонения шага.
Регулировка амплитуды входных сигналов и регулировка амплитуды выходных сигналов
Для цели настройки MIMO, когда выбор единиц приводит к смешению малых и больших сигналов в разных каналах отклика, эта опция позволяет задать относительную амплитуду каждой записи в векторнозначных сигналах. Эта информация используется для масштабирования внедиагональных членов в передаточной функции от целевых входов настройки к выходам. Такое масштабирование обеспечивает измерение кросс-соединений относительно амплитуды каждого опорного сигнала.
Если для этих параметров задано значение No, ограниченная функция передачи с обратной связью не масштабируется для относительных амплитуд сигнала. Когда выбор единиц приводит к смешиванию малых и больших сигналов, использование немасштабированной передаточной функции может привести к плохим результатам настройки. Задайте для опции значение Yes для обеспечения относительных амплитуд входных сигналов и выходных сигналов вашей передаточной функции.
Например, предположим, что цель настройки ограничивает передаточную функцию с 2 входами и 2 выходами. Предположим далее, что второй входной сигнал для передаточной функции имеет тенденцию быть примерно в 100 раз больше, чем первый сигнал. В этом случае выберите Yes и введите [1,100] в текстовом поле Амплитуды входных сигналов.
Регулировка амплитуды сигнала вызывает оценку цели настройки на масштабированной передаточной функции Do-1T (s) Di, где T (s) является немасштабированной передаточной функцией. Do и Di - диагональные матрицы с амплитудами выходных сигналов и амплитудами значений входных сигналов на диагонали соответственно.
Значение по умолчанию, No, означает, что масштабирование не применяется.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если требование настройки является жестким ограничением.
Цель отклонения шага заключается в удержании коэффициента усиления от возмущения до выходного значения ниже коэффициента усиления эталонной модели. Скалярное значение требования f (x) задаётся:
x) ‖ ∞,
или его дискретный временной эквивалент. Здесь Tdy (s, x) является функцией передачи с замкнутым контуром ограниченной реакции, ‖ ∞ обозначает H∞ норму ( см.norm). WF - это функция частотного взвешивания, полученная из профиля отклонения шага, указанного в цели настройки. Коэффициент усиления WF приблизительно соответствует обратному значению эталонной модели для значений коэффициента усиления в пределах 60 дБ от пикового коэффициента усиления. По числовым причинам взвешивающая функция выравнивается за пределами этого диапазона, если не указана ссылочная модель, изменяющая наклон за пределами этого диапазона. Эта корректировка называется регуляризацией. Поскольку полюса WF близки к s = 0 или s = Inf может привести к плохой цифровой настройке для настройки, не рекомендуется указывать эталонные модели с очень низкочастотной или очень высокочастотной динамикой. Дополнительные сведения о регуляризации и ее последствиях см. в разделе Визуализация целей настройки.
Эта цель настройки также накладывает неявное ограничение стабильности на функцию передачи с замкнутым контуром между указанными входами и выходами, вычисляемое с помощью циклов, открытых в указанных местоположениях открытия контура. Динамика, на которую влияет это неявное ограничение, является стабилизированной динамикой для этой цели настройки. Опции Минимальная скорость затухания (Minimum decay rate) и Максимальная собственная настройка частоты (Maximum natural frequency) управляют нижней и верхней границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию противоречат другим требованиям, на вкладке Настройка (Tuning) воспользуйтесь опциями настройки для изменения значений по умолчанию.
