В этом примере показано, как создать сценарий движения, в котором транспортное средство движется задним ходом с помощью приложения Конструктор сценариев движения. В этом примере указывается транспортное средство, которое завершает трехточечный поворот.
Трехточечный поворот - основной движущий маневр для смены направлений на дороге. Три сегмента трехточечного поворота состоят из следующих движений:
Идите вперед и поворачивайте к противоположной стороне дороги.
Проезжайте задним ходом, поворачивая назад к исходной стороне дороги.
Двигайтесь вперед к противоположной стороне дороги, чтобы завершить изменение направления.
Можно использовать обратные движения для разработки более сложных сценариев тестирования алгоритмов автоматического вождения.
Откройте приложение «Конструктор сценариев управления».
drivingScenarioDesigner
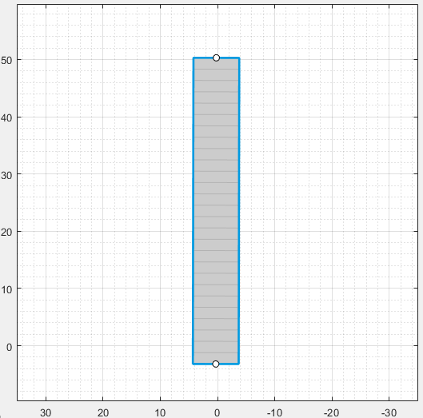
Добавьте прямую дорогу к сценарию. Щелкните правой кнопкой мыши панель «Холст сценария» и выберите «Добавить дорогу». Протяните дорогу к верху полотна, пока она не станет длиной около 50 метров. Дважды щелкните, чтобы зафиксировать дорогу к холсту.
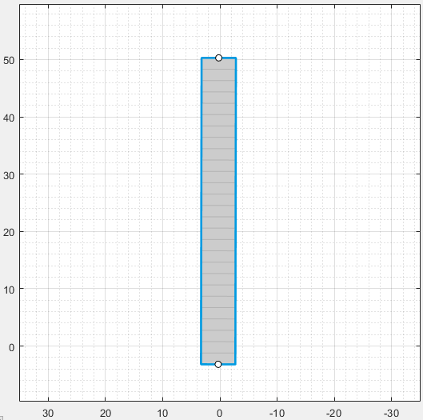
Расширить ширину дороги, чтобы оставить достаточно места для транспортного средства, чтобы завершить трехточечный поворот. На левой панели на вкладке «Дороги» увеличить ширину (м) с 6 кому 8.
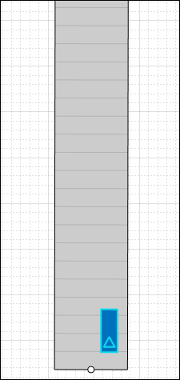
Добавить транспортное средство на дорогу. Щелкните правой кнопкой мыши в правом нижнем углу дороги и выберите «Добавить автомобиль». Увеличьте изображение транспортного средства и первой половины дороги, где транспортное средство будет выполнять поворот в три точки.
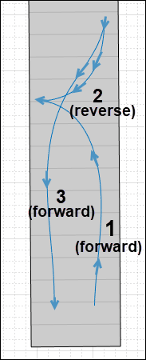
Укажите траекторию поворота транспортного средства в трех точках.
Щелкните правой кнопкой мыши транспортное средство и выберите «Добавить навигационные точки вперед». Указатель отображает положение (x, y) на холсте и направление движения автомобиля при указании ППМ.
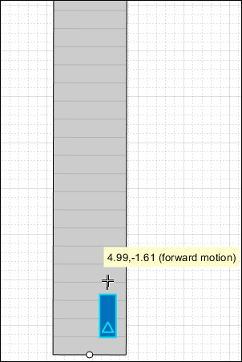
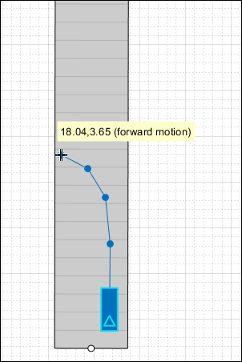
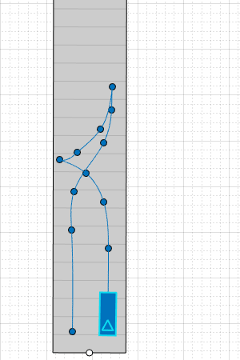
Укажите первый сегмент трехточечного поворота. Щелкните, чтобы добавить ППМ, которые поворачиваются к левой стороне дороги.
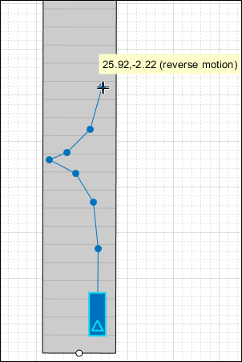
Укажите второй сегмент трехточечного поворота. Нажмите Ctrl + R, чтобы перейти к заданию обратных ППМ. Затем щелкните, чтобы добавить ППМ, которые поворачиваются назад к правой стороне дороги.
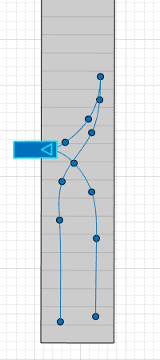
Укажите третий сегмент трехточечного поворота. Нажмите Ctrl + F, чтобы вернуться к заданию прямых ППМ. Затем щелкните, чтобы добавить ППМ, которые поворачиваются назад к левой стороне дороги, рядом с первым указанным ППМ.
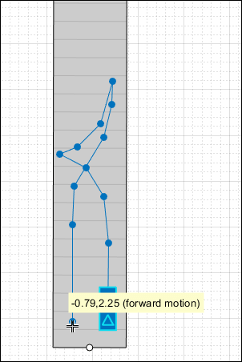
Нажмите Enter, чтобы зафиксировать ППМ на холсте.
Запустите моделирование. Чтобы просмотреть направление движения автомобиля, на панели инструментов приложения выберите Отображение > Показать индикатор позы актера во время моделирования.
Во время моделирования транспортное средство ненадолго останавливается между каждой точкой в трехточечном повороте. При переключении между прямыми и обратными движениями на траектории приложение автоматически устанавливает значение v (m/s) в ППМ, где происходит переключение на 0.
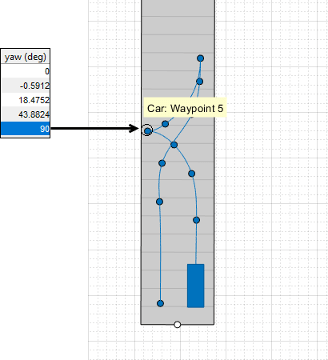
Чтобы точно настроить траекторию, установите конкретные углы ориентации рыскания для транспортного средства, которые должны быть достигнуты в определенных ППМ. Например, когда транспортное средство начинает свою траекторию обратного движения, предположим, что транспортное средство должно находиться точно под углом 90 градусов от места его начала.
Сначала определите идентификатор ППМ, в котором транспортное средство начинает это обратное движение, перемещая указатель над ППМ. Затем в таблицах «ППМ», «Скорости», «Время ожидания» и «Время ожидания» на левой панели установите значение (градус) для соответствующей строки равным 90. Например, если транспортное средство начинает свое обратное движение в ППМ 5, обновите пятый ряд столбца рыскания (градус).
Во время моделирования транспортное средство теперь повернуто ровно на 90 градусов от того места, где оно начиналось. Чтобы отменить ранее заданное значение yaw, щелкните ППМ правой кнопкой мыши и выберите «Восстановить Yaw по умолчанию». Можно также сбросить все заданные значения рыскания, щелкнув правой кнопкой мыши транспортное средство и выбрав Восстановить ярусы по умолчанию (Restore Default Yaws).
Для работы с предварительно созданными сценариями, в которых используются обратные движения и повороты с заданными значениями рыскания, см. предустановленные сценарии автономного экстренного торможения (AEB), описанные в разделе Сценарии вождения Euro NCAP в конструкторе сценариев вождения.
