Разработка сценариев управления, настройка датчиков и создание синтетических данных
Приложение «Конструктор сценариев вождения» позволяет разрабатывать синтетические сценарии вождения для тестирования автономных систем вождения.
С помощью приложения можно:
Создайте модели дорог и акторов с помощью интерфейса перетаскивания.
Настройте датчики зрения, радара, лидара и INS, установленные на эго-транспортном средстве. Эти датчики можно использовать для генерации обнаружений акторов и границ полос движения, данных облаков точек и инерционных измерений.
Сценарии управления нагрузкой, представляющие собой протоколы испытаний Европейской программы оценки новых автомобилей (Euro NCAP ®) [1][2][3] и другие предварительно разработанные сценарии.
Импорт дорог и полос OpenDRIVE ® в сценарий вождения. Приложение поддерживает спецификацию формата OpenDRIVE версии 1.4H [4].
Импорт дорожных данных из OpenStreetMap ®, HERE HD Live Map [1], или Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) [2] веб-сервисов в сценарий вождения .
Для импорта данных из Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) требуется пакет поддержки Automated Driving Toolbox™ Importer для Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) Service. Сведения об установке пакетов поддержки см. в разделе Получение надстроек и управление ими.
Экспорт дорожной сети в управляющем сценарии в формат файла OpenDRIVE 1.4H.
Экспортируйте дорожную сеть, участников и траектории из сценария управления в формат файла ASAM OpenSCRIPTIS ® 1.0.
Экспорт обнаруженных синтетических датчиков в MATLAB ®.
Создайте MATLAB-код сценария и датчиков, а затем программно измените сценарий и импортируйте его обратно в приложение для дальнейшего моделирования.
Создайте модель Simulink ® на основе сценария и датчиков и используйте созданные модели для тестирования алгоритмов слияния датчиков или управления транспортным средством.
Дополнительные сведения о приложении см. в разделе Конструктор сценариев управления.
MATLAB Toolstrip: На вкладке Приложения в разделе Автомобильный щелкните значок приложения.
командная строка MATLAB: Enter drivingScenarioDesigner.
Создайте сценарий движения транспортного средства по криволинейной дороге и экспортируйте модели дорог и транспортных средств в рабочее пространство MATLAB. Более подробный пример создания сценария вождения см. в разделах Создание сценария вождения в интерактивном режиме и Создание данных синтетического датчика.
Откройте приложение «Конструктор сценариев управления».
drivingScenarioDesigner
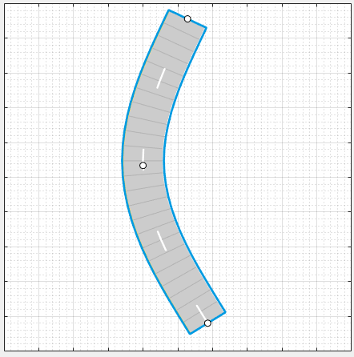
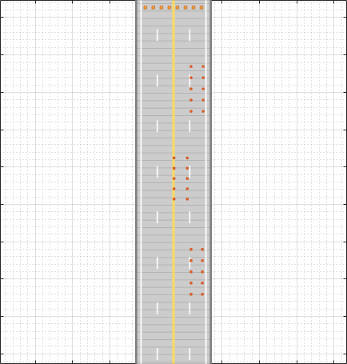
Создайте криволинейную дорогу. На панели инструментов приложения щелкните Добавить дорогу. Щелкните на нижней части полотна, удлините траекторию дороги до середины полотна и щелкните на полотне еще раз. Удлините траекторию дороги до верхней части полотна, а затем дважды щелкните, чтобы создать дорогу. Чтобы сделать кривую более сложной, щелкните и перетащите центры дорог (открытые окружности) или дважды щелкните дорогу, чтобы добавить дополнительные центры дорог.
Добавьте полосы движения к дороге. На левой панели на вкладке «Дороги» разверните раздел «Полосы движения». Задать для параметра «Количество полос» значение 2. По умолчанию дорога является односторонней и имеет сплошную разметку полосы с обеих сторон для обозначения обочины.
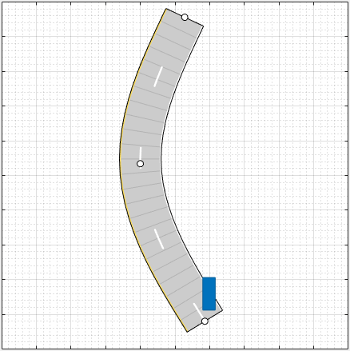
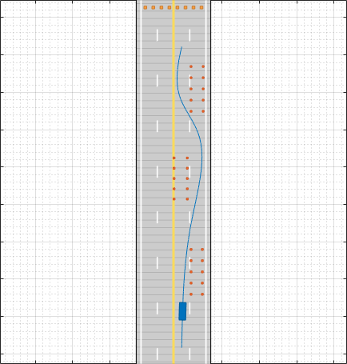
Добавить транспортное средство на одном конце дороги. На панели инструментов приложения выберите Добавить актера > Автомобиль. Затем щелкните дорогу, чтобы установить исходное положение автомобиля.
Задайте траекторию движения автомобиля. Щелкните автомобиль правой кнопкой мыши, выберите «Добавить ППМ вперед» и добавьте ППМ для прохождения автомобиля. После того, как вы добавите последний ППМ, нажмите Enter. Автомобиль autorotates в направлении первого ППМ.
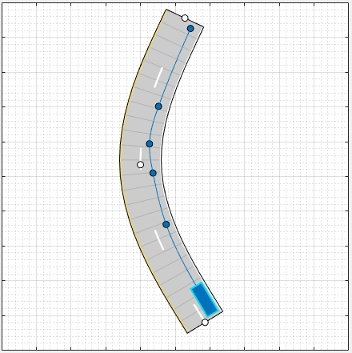
Отрегулируйте скорость автомобиля при прохождении между ППМ. В таблицах «ППМ», «Скорости», «Время ожидания» и «Время ожидания» на левой панели задайте скорость v (м/с) эго-транспортного средства при его входе в каждый сегмент ППМ. Увеличьте скорость автомобиля для прямых сегментов и уменьшите его скорость для изогнутых сегментов. Например, траектория имеет шесть ППМ, установите ячейки v (m/s) в 30, 20, 15, 15, 20, и 30.
Выполните сценарий и при необходимости настройте параметры настройки. Затем щелкните Сохранить > Дороги и актеры, чтобы сохранить модели дорог и автомобилей в MAT-файл.
Создание данных облака точек лидара из предварительно созданного сценария управления Euro NCAP.
Дополнительные сведения о готовых сценариях, доступных в приложении, см. в разделе Готовые сценарии вождения в конструкторе сценариев вождения.
Более подробную информацию о доступных сценариях Euro NCAP см. в разделе Сценарии вождения Euro NCAP в конструкторе сценариев вождения.
Загрузить сценарий автономного экстренного торможения (АЕБ) Euro NCAP при столкновении с ребенком-пешеходом. В момент столкновения точка удара приходится на 50% пути по ширине автомобиля.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('AEB_PedestrianChild_Nearside_50width.mat') rmpath(path) % Remove folder from path
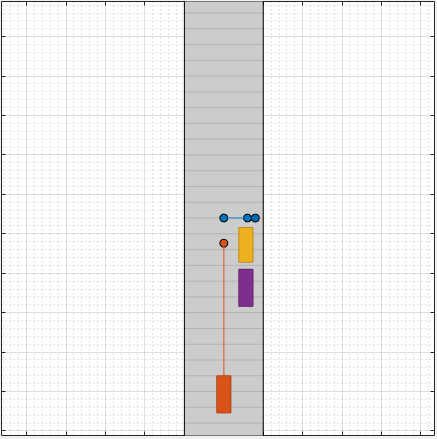
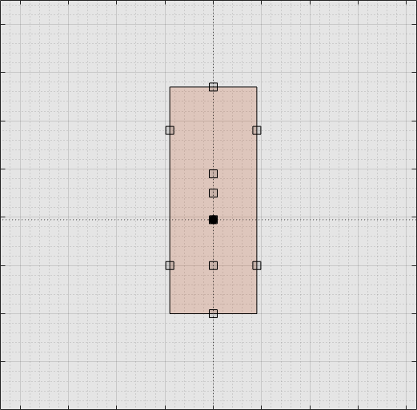
Добавьте лидарный датчик к эго-транспортному средству. Сначала щелкните Добавить лидар (Add Lidar). Затем на холсте сенсора щелкните заданное местоположение сенсора в центре крыши автомобиля. Датчик лидара отображается черным цветом в заданном месте. Серым цветом, окружающим автомобиль, является зона покрытия датчика.
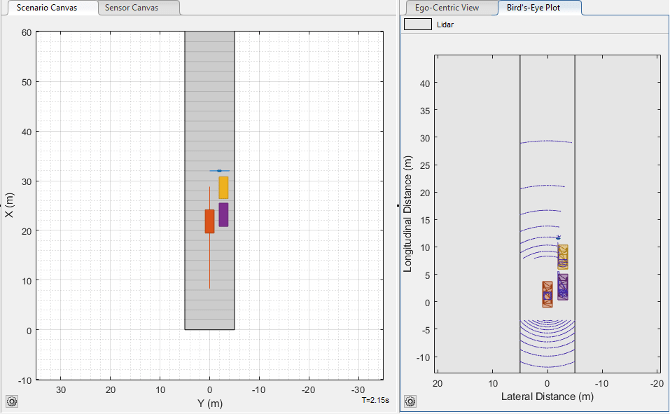
Выполните сценарий. Проверьте различные аспекты сценария путем переключения между холстами и видами. Можно переключаться между холстом датчика и холстом сценария, а также между графиком птичьего глаза и Эго-ориентированным видом.
На графике птичьего глаза и Ego-Centric View актеры отображаются в виде сетей, а не кубоидов. Чтобы изменить параметры отображения, используйте параметры отображения на панели инструментов приложения.
Экспортируйте данные датчика в рабочую область MATLAB. Щелкните Экспорт (Export) > Экспорт данных датчика (Export Sensor Data), введите имя переменной рабочего пространства и нажмите кнопку ОК.
Программно создайте сценарий вождения, радиолокационный датчик и датчик камеры. Затем импортируйте сценарий и датчики в приложение. Дополнительные сведения о работе с программными сценариями вождения и датчиками см. в разделе Создание вариантов сценария вождения программным способом.
Создание простого сценария управления с помощью drivingScenario объект. В этом сценарии эго-транспортное средство движется прямо по 50-метровому отрезку дороги с постоянной скоростью 30 метров в секунду. Для эго-транспортного средства укажите ClassID имущество 1. Это значение соответствует идентификатору класса приложения 1, которая относится к актерам класса Car. Дополнительные сведения о том, как приложение определяет классы, см. в разделе Описание параметра класса на вкладке Параметры актёров.
scenario = drivingScenario; roadCenters = [0 0 0; 50 0 0]; road(scenario,roadCenters); egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 0 0]); waypoints = [5 0 0; 45 0 0]; speed = 30; smoothTrajectory(egoVehicle,waypoints,speed)
Создание радиолокационного датчика с помощью drivingRadarDataGenerator объект и создайте датчик камеры с помощью visionDetectionGenerator объект. Установите оба датчика на начало координат транспортного средства, при этом радар будет направлен вперед, а камера - назад.
radar = drivingRadarDataGenerator('MountingLocation',[0 0 0]); camera = visionDetectionGenerator('SensorLocation',[0 0],'Yaw',-180);
Импортируйте сценарий, фронтальный радарный датчик и сенсор камеры в приложении.
drivingScenarioDesigner(scenario,{radar,camera})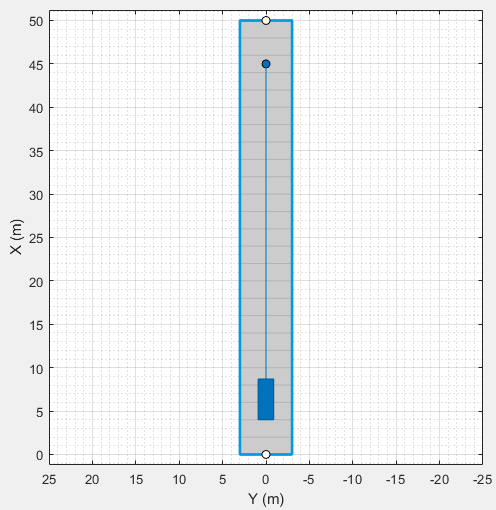
Затем можно выполнить сценарий и изменить сценарий и датчики. Создание новых drivingScenario, drivingRadarDataGenerator, и visionDetectionGenerator на панели инструментов приложения выберите «Экспорт» > «Экспорт функции MATLAB», а затем запустите созданную функцию.
Загрузите сценарий управления, содержащий датчик, и создайте модель Simulink из сценария и датчика. Более подробный пример создания моделей Simulink из приложения см. в разделе Создание блоков датчиков с помощью конструктора сценариев управления.
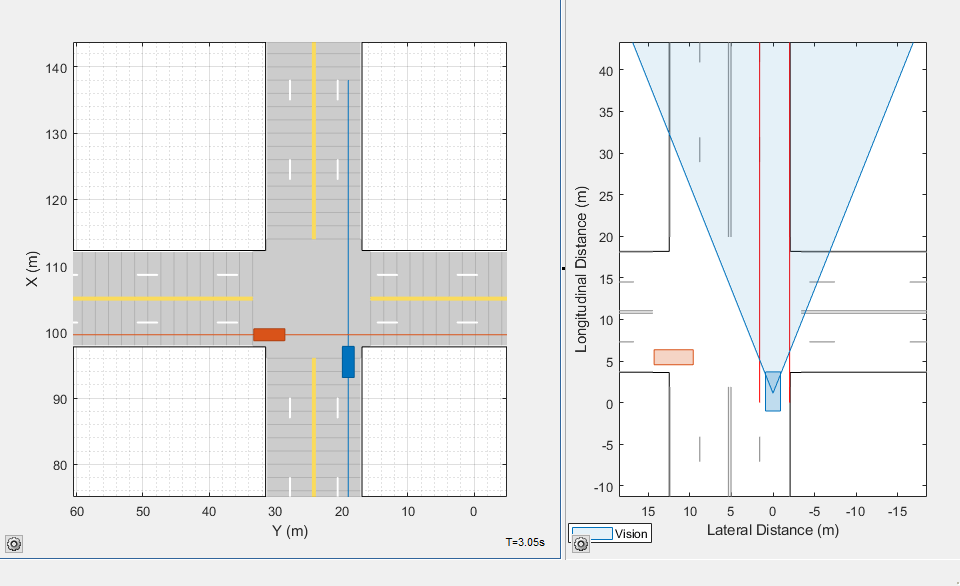
Погрузите предварительно созданный сценарий вождения в приложение. Сценарий содержит два транспортных средства, пересекающих перекресток. Эго-автомобиль движется на север и содержит датчик камеры. Этот датчик сконфигурирован для обнаружения как объектов, так и полос движения.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario','PrebuiltScenarios'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat') rmpath(path) % Remove folder from path
Создайте модель Simulink сценария и датчика. На панели инструментов приложения выберите «Экспорт» > «Экспорт модели Simulink». При появлении запроса сохраните файл сценария.
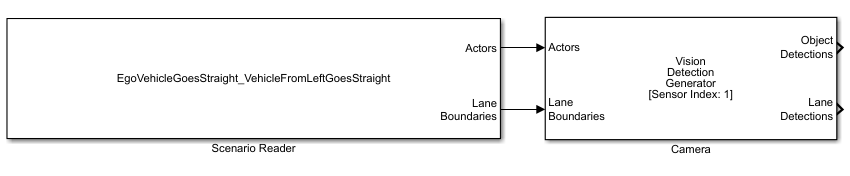
Блок чтения сценариев считывает дорогу и субъектов из файла сценария. Чтобы обновить данные сценария в модели, обновите сценарий в приложении и сохраните файл.
Блок генератора обнаружения изображений повторно создает датчик камеры, определенный в приложении. Чтобы обновить датчик в модели, обновите датчик в приложении, выберите «Экспорт» > «Экспорт модели симулятора датчика» и скопируйте вновь созданный блок датчика в модель. Если при обновлении датчиков были обновлены дороги или актеры, выберите «Экспорт» > «Экспорт модели симулятора». В этом случае блок чтения сценариев точно считывает данные профиля актера и передает их датчику.
Создайте сценарий с траекториями транспортного средства, который впоследствии можно будет воссоздать в Simulink для моделирования в среде 3D.
Откройте один из готовых сценариев, который воссоздает сцену по умолчанию, доступную в среде 3D. На панели инструментов приложения выберите «Открыть» > «Предварительный сценарий» > «Simulation3D» и выберите сценарий. Например, выберите DoubleLaneChange.mat сценарий.
Укажите транспортное средство и его траекторию.
Обновите размеры транспортного средства в соответствии с размерами предварительно определенных типов транспортных средств в среде моделирования 3D.
На вкладке Actors выберите 3D выбор Типа Показа, который Вы хотите.
На панели инструментов приложения выберите команду 3D Отображение > Использовать 3D Размеры актера моделирования. В Холсте сценария размеры актера обновляются в соответствии с предварительно определенными размерами актеров в среде моделирования 3D.
Просмотрите, как будет выглядеть сценарий при последующем его повторном создании в Simulink. На приложении toolstrip, выберите 3D Показ> Моделирование Представления в 3D Показе. После открытия окна отображения 3D щелкните Выполнить (Run).
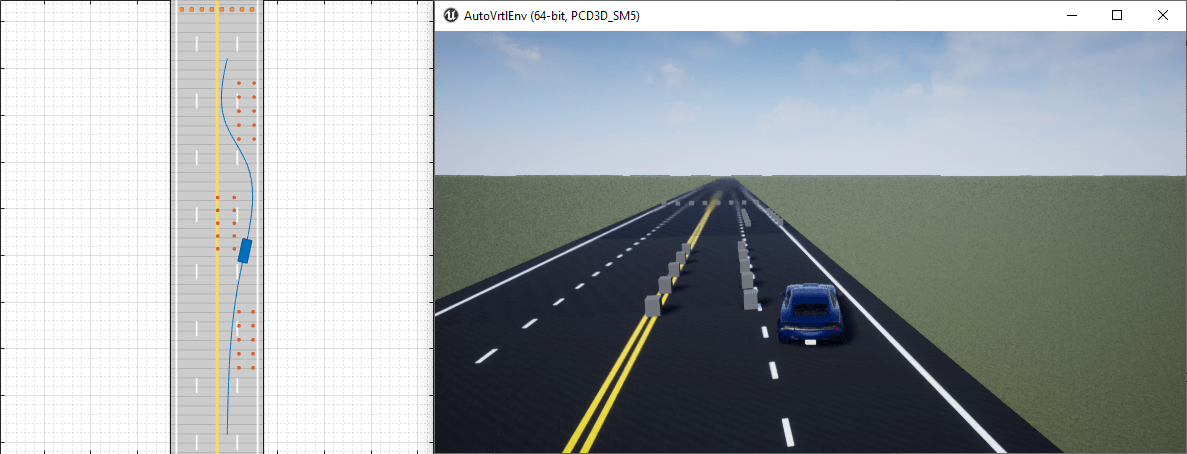
При необходимости измените транспортное средство и траекторию движения. Избегайте изменения дорожной сети или субъектов, предварительно определенных в сценарии. В противном случае сценарий приложения не будет соответствовать сценарию, который будет создан позже в Simulink. При изменении сценария окно просмотра 3D закрывается.
После изменения сценария его можно повторно создать в модели Simulink для использования в среде моделирования 3D. Пример настройки такой модели см. в разделе Визуализация данных датчика из среды моделирования нереального механизма.
Roads - ширина дороги, угол крена, технические характеристики полосы движения и расположение центра дороги;Чтобы включить параметры «Дороги», добавьте в сценарий хотя бы одну дорогу. Затем выберите дорогу из параметра «Холст сценария» или «Дорога». Значения параметров на вкладке «Дороги» зависят от выбранной дороги.
| Параметр | Описание |
|---|---|
| Дорога | Изменяемая дорога, указанная как список дорог в сценарии. |
| Имя | Название дороги. Имя импортированной дороги зависит от сервиса карты. Например, когда вы генерируете дорогу, используя данные OpenStreetMap, приложение использует имя дороги, когда она доступна. В противном случае приложение использует идентификатор дороги, заданный данными OpenStreetMap. |
| Ширина (м) | Ширина дороги, в метрах, заданная как десятичный скаляр в диапазоне (0, 50]. Если кривизна дороги слишком резкая, чтобы соответствовать указанной ширине дороги, приложение не создает дорогу. По умолчанию: |
| Количество сегментов дорог | Количество сегментов дороги, указанное как положительное целое число. Этот параметр используется для включения спецификации составной полосы движения путем разделения дороги на сегменты дороги. Каждый сегмент дороги представляет собой часть дороги с определенной спецификацией полосы движения. Спецификации полос отличаются от одного сегмента дороги к другому. Дополнительные сведения о спецификациях составных полос см. в разделе Спецификация составных полос. По умолчанию: |
| Диапазон сегментов | Нормализованный диапазон для каждого сегмента дороги, заданный в виде вектора строки значений в диапазоне (0, 1). Длина вектора должна быть равна значению параметра «Количество сегментов дорог». Сумма вектора должна быть равна По умолчанию диапазон каждого сегмента дороги является обратным числу сегментов дороги. Зависимости Чтобы включить этот параметр, укажите значение параметра «Количество сегментов дороги», превышающее |
| Дорожный сегмент | Выберите сегмент дороги из списка, чтобы задать его параметры «Полосы движения». Зависимости Чтобы включить этот параметр, укажите значение параметра «Количество сегментов дороги», превышающее |
Lanes - Спецификации полос, такие как типы полос и разметка полосЭти параметры используются для указания информации о полосах движения, например типов полос движения и разметки полос движения. Если значение параметра «Количество сегментов дорог» больше 1эти параметры применяются к выбранному сегменту дороги.
| Параметр | Описание | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полос движения | Количество полос движения в дороге, указанное как одно из следующих значений:
При увеличении количества полос добавленные полосы имеют ширину, заданную параметром «Ширина полосы» (m). Если параметр «Ширина полосы» (m) является вектором различной ширины полосы, то добавленные полосы имеют ширину, заданную в последнем векторном элементе. | ||||||||||||
| Ширина полосы движения (м) | Ширина каждой полосы движения дороги в метрах определяется как одно из следующих значений:
Ширина каждой полосы должна быть больше ширины ее разметки. Эта разметка полосы определяется параметром «Маркировка > Ширина (м)». | ||||||||||||
| Типы полос движения | Полосы движения на дороге, указанные как список типов полос движения на выбранной дороге. Чтобы изменить один или несколько параметров полосы движения, включая тип, цвет и прочность полосы движения, выберите нужную полосу движения из раскрывающегося списка. | ||||||||||||
| Типы полос движения > Тип | Тип полосы, указанный как одно из следующих значений:
По умолчанию: | ||||||||||||
| Типы полос движения > Цвет | Цвет полосы, определяемый как триплет RGB со значениями по умолчанию:
Можно также указать некоторые общие цвета как триплет RGB, шестнадцатеричный код цвета, имя цвета или короткое имя цвета. Дополнительные сведения см. в разделе Цветовые характеристики полос движения и разметки. | ||||||||||||
| Типы полос движения > Прочность | Интенсивность насыщения цвета полосы, заданная как десятичный скаляр в диапазоне [0, 1].
По умолчанию: | ||||||||||||
| Разметка полосы движения | Разметка полосы движения, заданная как список разметки полосы движения на выбранной дороге. Чтобы изменить один или несколько параметров разметки полосы движения, которые включают тип, цвет и прочность разметки, выберите требуемую разметку полосы движения из раскрывающегося списка. Дорога с N полосами имеет (N + 1) разметку полос. | ||||||||||||
| Разметка полосы движения > Указать несколько типов маркеров вдоль полосы движения | Выберите этот параметр для определения составной разметки полосы движения. Составная разметка полосы содержит несколько типов маркеров вдоль полосы. Часть разметки полосы движения, которая содержит каждый тип маркера, называется сегментом маркера. Дополнительные сведения о разметке составной полосы см. в разделе Разметка составной полосы. | ||||||||||||
| Разметка полосы движения > Количество сегментов маркера | Число сегментов маркера в составной разметке полосы движения, указанное как целое число, большее или равное 2. Составная разметка полосы движения должна иметь по крайней мере два маркерных сегмента. По умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр «Указать несколько типов маркеров вдоль полосы движения». | ||||||||||||
| Разметка полосы движения > Диапазон сегментов | Нормализованный диапазон для каждого сегмента маркера в комбинированной разметке полосы движения, заданный в виде вектора строки значений в диапазоне [0, 1]. Длина вектора должна быть равна значению параметра «Количество сегментов маркера». По умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр «Указать несколько типов маркеров вдоль полосы движения». | ||||||||||||
| Разметка полосы движения > Сегмент маркера | Сегменты маркеров, заданные как список типов маркеров в выбранной разметке полосы движения. Чтобы изменить один или несколько параметров сегмента маркера, включая тип, цвет и прочность маркера, выберите нужный сегмент маркера из раскрывающегося списка. Зависимости Чтобы включить этот параметр, выберите параметр «Указать несколько типов маркеров вдоль полосы движения». | ||||||||||||
| Разметка полосы движения > Тип | Тип разметки полосы движения, указанный как одно из следующих значений:
По умолчанию для дороги с односторонним движением разметка левой полосы представляет собой сплошную желтую линию, разметка правой полосы представляет собой сплошную белую линию, а разметка внутренних полос представляет собой пунктирные белые линии. Для двухсторонних дорог по умолчанию самой внешней разметкой полосы движения являются сплошные белые линии, а разметкой разделительной полосы - две сплошные желтые линии. Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. | ||||||||||||
| Разметка полосы движения > Цвет | Цвет разметки полосы движения, определяемый как триплет RGB, шестнадцатеричный код цвета, имя цвета или короткое имя цвета. Для обозначения полосы движения, указывающего двойную линию, для обеих линий используется один и тот же цвет. Можно также указать некоторые общие цвета как триплет RGB, шестнадцатеричный код цвета, имя цвета или короткое имя цвета. Дополнительные сведения см. в разделе Цветовые характеристики полос движения и разметки. Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. | ||||||||||||
| Разметка полосы движения > Прочность | Сила насыщения цвета разметки полосы, заданная как десятичный скаляр в диапазоне [0, 1].
Для обозначения полосы движения, указывающего двойную линию, для обеих линий используется одинаковая прочность. По умолчанию: Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. | ||||||||||||
| Разметка полосы движения > Ширина (м) | Ширина разметки полосы, в метрах, заданная как положительный десятичный скаляр. Ширина разметки полосы должна быть меньше ширины ее ограждающей полосы. Ограждающая полоса - полоса непосредственно слева от разметки полосы. Для обозначения полосы движения, указывающего двойную линию, для обеих линий используется одинаковая ширина. По умолчанию: Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. | ||||||||||||
| Разметка полосы движения > Длина (м) | Длина тире в штриховой разметке полосы, в метрах, заданная как десятичный скаляр в диапазоне (0, 50]. Для обозначения полосы движения, указывающего двойную линию, для обеих линий используется одинаковая длина. По умолчанию: Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. | ||||||||||||
| Разметка полосы движения > Пространство (м) | Длина промежутков между штрихами в штриховой разметке полосы, в метрах, заданная как десятичный скаляр в диапазоне (0, 150]. Для обозначения полосы движения, указывающего двойную линию, для обеих линий используется одно и то же пространство. По умолчанию: Если включен параметр «Указать несколько типов маркеров вдоль полосы движения», то это значение применяется к выбранному сегменту маркера в составной разметке полосы движения. |
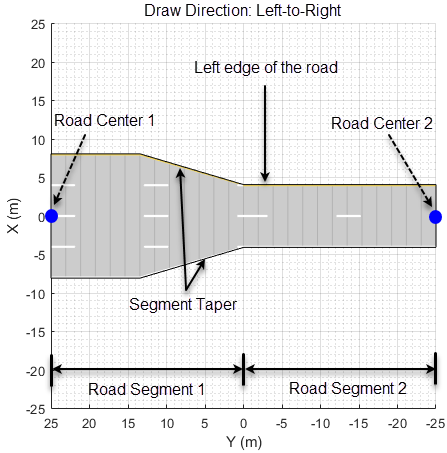
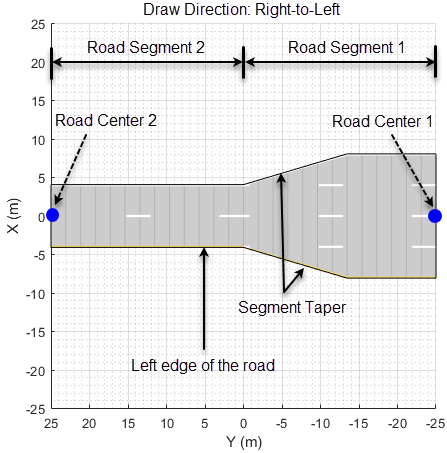
Segment Taper - Технические характеристики конусности между двумя сегментами дорогиЧтобы включить параметры конусности сегмента, задайте значение параметра «Количество сегментов дороги», превышающее 1и укажите отдельное значение для параметра «Количество полос движения» или «Ширина полосы движения (m)» по крайней мере для одного сегмента дороги. Затем выберите конусность из раскрывающегося списка, чтобы задать параметры конусности.
Дорога с N сегментами дорог имеет (N-1) сегменты, сужающиеся. L-й конус, где L < N, является частью L-го сегмента дороги.
| Параметр | Описание |
|---|---|
| Форма | Конусная форма сегмента дороги, указанная как По умолчанию: |
| Длина (м) | Длина конусности сегмента дороги, заданная как положительный скаляр. Единицы в метрах. Длина конусности по умолчанию меньше Указанная длина конуса должна быть меньше длины соответствующего сегмента дороги. В противном случае приложение сбрасывает его на значение, равное Зависимости Чтобы включить этот параметр, задайте для параметра Shape значение |
| Положение | Край сегмента дороги, от которого требуется добавить или сбросить полосы движения, указанный как одно из следующих значений:
Можно задать значение этого параметра для соединения двух сегментов односторонней дороги. При соединении сегментов двухсторонней дороги друг с другом или сегментов односторонней дороги с сегментами двухсторонней дороги приложение определяет значение этого параметра на основе указанного параметра «Количество полос движения». Для добавления или удаления полос с обоих краев сегмента дороги с односторонним движением число полос в сегментах дороги с односторонним движением должно отличаться на четное число. По умолчанию: Зависимости Чтобы включить этот параметр, задайте различные целочисленные скаляры для параметров «Количество полос движения» различных сегментов дорог. |
Road Centers - Расположение центра дорогЭти параметры используются для задания ориентации дороги.
| Параметр | Описание |
|---|---|
| Угол крена (град.) | Наклон дороги по бокам в градусах, указанный как одно из следующих значений:
При добавлении актера на дорогу не требуется изменять положение актера в соответствии с углами крена, заданными этим параметром. Актер автоматически следует за береговыми углами дороги. По умолчанию: |
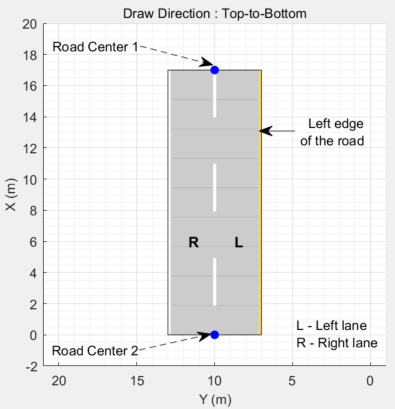
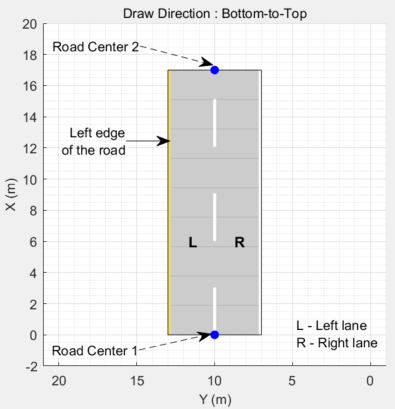
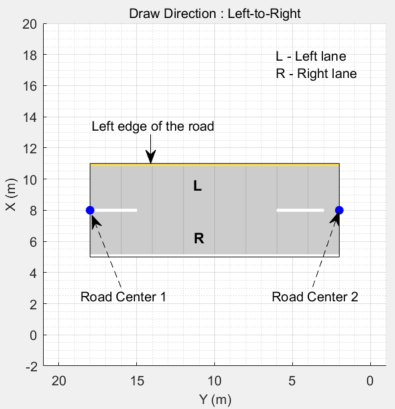
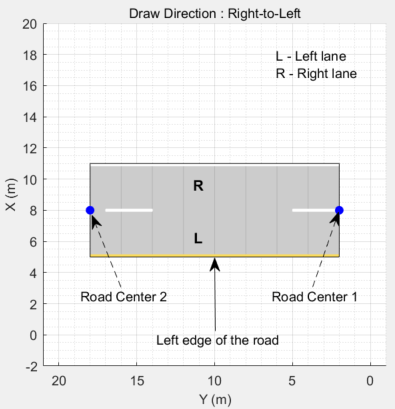
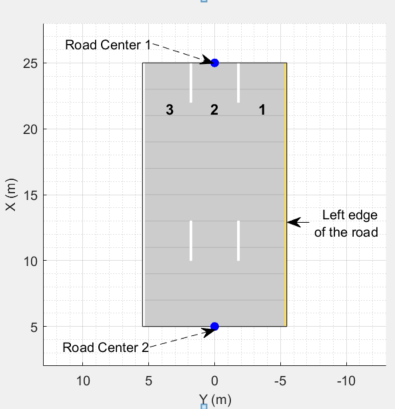
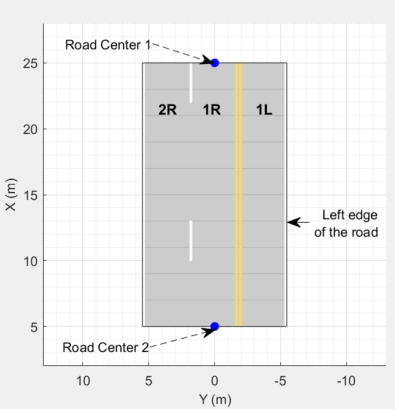
Каждая строка таблицы «Центры дорог» содержит позиции x, y и z центра дороги в пределах выбранной дороги. Все дороги должны иметь не менее двух уникальных позиций центра дороги. При обновлении ячейки в таблице Холст сценария обновляется для отражения новой позиции центра дороги. Ориентация дороги зависит от значений центров дорог. Центры дорог определяют направление, в котором выполняется визуализация дороги в холсте «Сценарий». Дополнительные сведения см. в разделе Направление дороги и нумерация полос движения.
| Параметр | Описание |
|---|---|
| x (m) | Положение центра дороги по оси X в метрах, указанное как десятичный скаляр. |
| y (m) | Положение центра дороги по оси y в метрах, указанное как десятичный скаляр. |
| z (m) | положение центра дороги по оси Z в метрах, указанное как десятичный скаляр.
По умолчанию: |
Road Group Centers - Расположение центра пересеченияКаждая строка таблицы «Центры групп дорог» содержит положения центра по осям X, Y и Z в пределах выбранного пересечения импортированной сети дорог. Эти параметры расположения центра доступны только для чтения, поскольку пересечения не могут быть созданы в интерактивном режиме. Используйте roadGroup для добавления пересечения к сценарию программным способом.
| Параметр | Описание |
|---|---|
| x (m) | Положение центра пересечения по оси X в метрах, указанное как десятичный скаляр. |
| y (m) | Положение центра пересечения по оси y в метрах, указанное как десятичный скаляр. |
| z (m) | положение центра дороги по оси Z в метрах, указанное как десятичный скаляр.
Зависимости Чтобы включить этот параметр, выберите пересечение в окне «Сценарий». Приложение включает этот параметр только для следующих случаев:
|
Actors - Позиции актера, ориентации, модели RCS и траекторииЧтобы включить параметры Actors, добавьте в сценарий хотя бы одного актера. Затем выберите актера на экране «Сценарий» или в списке на вкладке «Актеры». Значения параметров на вкладке Актёры (Actors) зависят от выбранного актёра. Если выбрать несколько актеров, многие из этих параметров будут отключены.
| Параметр | Описание | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Цвет | Чтобы изменить цвет актера, рядом со списком выбора актера щелкните цветовой фрагмент для этого актера.
Затем с помощью палитры цветов выберите один из стандартных цветов, обычно используемых в графике MATLAB. Либо выберите пользовательский цвет на вкладке Пользовательские цвета (Custom Colors), сначала щелкнув По умолчанию приложение устанавливает для каждого вновь созданного актера новый цвет. Этот порядок цветов основан на порядке цветов по умолчанию Чтобы задать один цвет по умолчанию для всех вновь созданных актёров определенного класса, на панели инструментов приложения выберите «Добавить актера» > «Редактировать классы актёров». Затем выберите Задать цвет по умолчанию (Set Default Color) и щелкните соответствующий цветовой фрагмент, чтобы задать цвет. Чтобы выбрать цвет по умолчанию для класса, Холст сценария не должен содержать актеров этого класса. Изменения цвета, внесенные в приложение, переносятся в визуализацию области действия Bird 's-Eye. | ||||||||||||||
| Установить в качестве транспортного средства Ego | Задайте выбранного актера в качестве транспортного средства ego в сценарии. При добавлении датчиков в сценарий приложение добавляет их в средство ego. Кроме того, окна Ego-Centric View и Bird 's-Eye Plot отображают моделирование с точки зрения ego-транспортного средства. Только актеры, имеющие классы транспортных средств, такие как Дополнительные сведения о классах актера см. в описании параметра Класс. | ||||||||||||||
| Имя | Имя актёра. | ||||||||||||||
| Класс | Класс актера, указанный как список классов, в которые можно изменить выбранного актера. Изменить класс актеров транспортных средств можно только на другие классы транспортных средств. Классы транспортных средств по умолчанию: Список классов транспортных средств и неавтомобилей отображается в инструментальной полосе приложения в разделах «Добавить актера» > «Транспортные средства» и «Добавить актера» > «Другие» или «Добавить актера» > «Барьеры» соответственно. Субъекты, созданные в приложении, имеют наборы размеров по умолчанию, паттерны сечения радара и другие свойства на основе их значения идентификатора класса. В таблице показаны значения идентификатора класса по умолчанию и классы акторов.
Чтобы изменить классы актёров или создать новые классы актёров, на панели инструментов приложения выберите «Добавить актёра» > «Редактировать классы актёров» или «Добавить актёра» > «Новый класс актёров» соответственно. | ||||||||||||||
| 3D Тип отображения | Тип отображения актера в том виде, в котором он отображается в окне отображения 3D, указанный как список типов отображения, в который можно изменить выбранного актера. Показать сценарий в 3D окне экрана во время моделирования, на приложении toolstrip, 3D Показ щелчка> Моделирование Представления в 3D Показе. Приложение визуализирует этот экран с помощью Unreal Engine ® от Epic Games ®. Для любого актера доступные 3D варианты Типа Показа зависят от класса актера, определенного в параметре Класса.
При изменении размеров актера с помощью параметров «Свойства актера» приложение применяет эти изменения на экране «Холст сценария», но не на 3D экране. Этот случай не применяется к актерам, 3D тип отображения которых имеет значение В 3D отображении актеры всех других типов отображения имеют предопределенные размеры. Чтобы использовать одни и те же размеры на обоих экранах, можно применить предопределенные 3D отображаемые размеры к актерам на экране Screage Canvas. На приложении toolstrip, под 3D Показом, выбирают Использование 3D Размеры Актера Моделирования. |
Actor Properties - Свойства актера, включая положение и ориентациюЭти параметры используются для задания таких свойств, как положение и ориентация актера.
| Параметр | Описание |
|---|---|
| Длина (м) | Длина актера, в метрах, заданная как десятичный скаляр в диапазоне (0, 60]. Для транспортных средств длина должна быть больше (передний свес + задний свес). |
| Ширина (м) | Ширина актера, в метрах, заданная как десятичный скаляр в диапазоне (0, 20]. |
| Высота (м) | Высота актера, в метрах, заданная как десятичный скаляр в диапазоне (0, 20]. |
| Передний свес | Расстояние между передней осью и передним бампером в метрах, указанное как десятичный скаляр. Передний свес должен быть меньше (Длина (м) - Задний свес). Этот параметр применяется только к транспортным средствам. По умолчанию: |
| Задний свес | Расстояние между задней осью и задним бампером в метрах, указанное как десятичный скаляр. Задний свес должен быть меньше (Длина (м) - Передний свес). Этот параметр применяется только к транспортным средствам. По умолчанию: |
| Крен (°) | Угол ориентации актера вокруг его оси X в градусах, заданный как десятичный скаляр. Крен (°) положителен по часовой стрелке при взгляде в прямом направлении оси X, которая указывает вперед от актера. При экспорте функции MATLAB ведущего сценария и выполнении этой функции углы крена акторов в выходном сценарии переносятся в диапазон [-180, 180]. По умолчанию: |
| Шаг (°) | Угол ориентации актера относительно его оси y в градусах, заданный как десятичный скаляр. Шаг (°) положителен по часовой стрелке при взгляде в прямом направлении оси y, которая указывает влево от актера. При экспорте функции MATLAB ведущего сценария и выполнении этой функции углы тангажа акторов в выходном сценарии переносятся в диапазон [-180, 180]. По умолчанию: |
| Рыскание (°) | Угол ориентации актера относительно его оси z в градусах, заданный как десятичный скаляр. Yaw (°) является положительной по часовой стрелке при взгляде в прямом направлении оси Z, которая указывает вверх от земли. Тем не менее, Scription Canvas имеет перспективу птичьего взгляда, которая смотрит в обратном направлении оси Z. Поэтому при просмотре актёров на этом полотне Yaw (°) против часовой стрелки положителен. При экспорте функции MATLAB ведущего сценария и выполнении этой функции углы рыскания акторов в выходном сценарии переносятся в диапазон [-180, 180]. По умолчанию: |
Radar Cross Section - RCS актераЭти параметры используются для ручного задания сечения РЛС (RCS) актера. Кроме того, чтобы импортировать RCS из файла или из рабочей области MATLAB, разверните этот раздел параметров и щелкните Импорт (Import).
| Параметр | Описание |
|---|---|
| Азимутальные углы (град.) | Горизонтальная картина отражения актера, в градусах, заданная как вектор монотонно увеличивающихся десятичных значений в диапазоне [-180, 180]. По умолчанию: |
| Углы возвышения (град.) | Вертикальная картина отражения актера в градусах, заданная как вектор монотонно увеличивающихся десятичных значений в диапазоне [-90, 90]. По умолчанию: |
| Шаблон (dBsm) | Шаблон RCS в децибелах на квадратный метр, заданный как таблица Q-by-P десятичных значений. РСК - функция углов азимута и места, где:
|
Trajectory - Траектории актераС помощью таблиц «ППМ», «Скорости», «Время ожидания» и «Время ожидания» можно вручную задать или изменить положения, скорости, время ожидания и углы ориентации для актеров в указанных ППМ. При задании траекторий для переключения между добавлением ППМ прямого и обратного движения используйте кнопки добавления ППМ прямого и обратного движения.![]()
| Параметр | Описание |
|---|---|
| Постоянная скорость (м/с) | Скорость актёров по умолчанию при добавлении ППМ, заданная как положительный десятичный скаляр в метрах в секунду. Если задать определенные значения скорости в столбце v (м/с) таблиц «ППМ», «Скорости», «Время ожидания» и «Время ожидания», приложение очистит значение «Постоянная скорость» (м/с). Если затем указать новое значение постоянной скорости (м/с), приложение установит для всех ППМ новое значение постоянной скорости. Скорость актера по умолчанию зависит от класса актера. Например, легковые и грузовые автомобили имеют постоянную скорость по умолчанию 30 метров в секунду, в то время как пешеходы имеют постоянную скорость по умолчанию 1,5 метра в секунду. |
| «ППМ», «Скорости», «Время ожидания» и «Yaw» | ППМ актера, указанные как таблица. Каждая строка соответствует ППМ и содержит положение, скорость и ориентацию актера в этом ППМ. Таблица содержит следующие столбцы:
|
| Использовать плавную траекторию с ограничением рывка | Выберите этот параметр, чтобы задать гладкую траекторию для актера. Плавные траектории не имеют разрывов в ускорении и требуются для моделирования датчиков ИНС. Если установить ИНС-датчик на эго-транспортном средстве, приложение обновит эго-транспортное средство для использования плавной траектории. Если приложению не удается создать гладкую траекторию, попробуйте внести следующие изменения:
Приложение вычисляет плавные траектории с помощью По умолчанию: |
| Рывок (м/с3) | Максимальный продольный рывок актера, в метрах в секунду кубический, определяемый как действительный скаляр, больший или равный 0,1. |
| Параметр | Описание |
|---|---|
| Актер нерестится и унывает | Выберите этот параметр, чтобы вызвать или отключить актера в сценарии управления во время выполнения моделирования. Чтобы включить этот параметр, необходимо сначала выбрать актера в сценарии, нажав на актера. Укажите значения параметров «Время входа» и «Время выхода», чтобы заставить актера ввести (создать) и выйти (отключить) сценарий соответственно. По умолчанию: |
| Время (и) входа | Время входа, в течение которого актер во время моделирования порождает сценарий, определяемое как одно из следующих значений:
Значение по умолчанию для времени ввода: |
| Время выхода | Время выхода актера из сценария во время моделирования, указанное как одно из следующих значений:
Значение по умолчанию для времени выхода - |
Чтобы получить ожидаемое поведение нереста и упадка, параметры Время входа и Время выхода должны удовлетворять следующим условиям:
Каждое значение параметра Entry Time (s) должно быть меньше соответствующего значения параметра Exit Time (s).
Каждое значение параметров Entry Time (ы) и Exit Time (ы) должно быть меньше всего времени моделирования, которое задается либо условием остановки, либо временем остановки.
Если параметры Entry Time (s) и Exit Time (s) указаны как векторы:
Элементы каждого вектора должны быть в порядке возрастания.
Длины обоих векторов должны быть одинаковыми.
Barriers - Свойства барьерного сегмента, расположение центра барьера и узоры RCS Чтобы включить параметры «Барьеры», добавьте в сценарий хотя бы один барьер. Затем выберите барьер на холсте «Сценарий» или на вкладке «Барьеры». Значения параметров на вкладке «Барьеры» основаны на выбранном барьере.
| Параметр | Описание |
|---|---|
| Цвет | Чтобы изменить цвет барьера, рядом со списком выбора актера щелкните цветовой фрагмент для этого барьера. Затем с помощью палитры цветов выберите один из стандартных цветов, обычно используемых в графике MATLAB. Либо выберите пользовательский цвет на вкладке Пользовательские цвета (Custom Colors), сначала щелкнув Изменения цвета, внесенные в приложение, переносятся в визуализацию области действия Bird 's-Eye. |
| Имя | Наименование барьера |
| Угол крена (°) | Наклон барьера по бокам в градусах, указанный как одно из следующих значений:
Это свойство допустимо только при добавлении барьера с использованием центров барьера. При добавлении барьера к дороге он автоматически принимает углы берега дороги. По умолчанию: |
| Тип барьера | Тип барьера, указанный в качестве одной из следующих опций:
|
Barrier Properties - Барьерные свойства Эти параметры используются для задания физических свойств барьера.
| Параметр | Описание |
|---|---|
| Ширина (м) | Ширина барьера, в метрах, заданная как десятичный скаляр в диапазоне (0,20]. По умолчанию:
|
| Высота (м) | Высота барьера, в метрах, заданная как десятичный скаляр в диапазоне (0,20]. По умолчанию:
|
| Длина сегмента (м) | Длина каждого барьерного сегмента, в метрах, заданная как десятичный скаляр в диапазоне (0,100]. По умолчанию: |
| Разрыв сегмента (м) | Промежуток между последовательными барьерными сегментами в метрах, указанный как десятичный скаляр в диапазоне [0, По умолчанию: |
Radar Cross Section - RCS барьераЭти параметры используются для задания радиолокаторного сечения (RCS) барьера вручную. Кроме того, чтобы импортировать RCS из файла или из рабочей области MATLAB, разверните этот раздел параметров и щелкните Импорт (Import).
| Параметр | Описание |
|---|---|
| Азимутальные углы (град.) | Горизонтальная картина отражения барьера в градусах, заданная как вектор монотонно увеличивающихся десятичных значений в диапазоне [-180, 180]. По умолчанию: |
| Углы возвышения (град.) | Вертикальная картина отражения барьера в градусах, заданная как вектор монотонно увеличивающихся десятичных значений в диапазоне [-90, 90]. По умолчанию: |
| Шаблон (dBsm) | Шаблон RCS в децибелах на квадратный метр, заданный как таблица Q-by-P десятичных значений. РСК - функция углов азимута и места, где:
|
Barrier Centers - Расположение центра барьераКаждая строка таблицы Центры барьера содержит положения x, y и z центра барьера в пределах выбранного барьера. Все барьеры должны иметь по крайней мере два уникальных положения центра барьера. При обновлении ячейки в таблице Холст сценария обновляется, отражая новое положение центра барьера. Ориентация барьера зависит от значений центров барьера. Центры барьера определяют направление, в котором выполняется визуализация барьера в Холсте сценария.
| Параметр | Описание |
|---|---|
| Смещение кромки дороги (м) | Расстояние, на которое барьер смещается от края дороги в поперечном направлении, в метрах, указанное как десятичный скаляр. |
| x (m) | положение центра барьера по оси X в метрах, указанное как десятичный скаляр. |
| y (m) | Положение центра барьера по оси y в метрах, указанное как десятичный скаляр. |
| z (m) | положение центра барьера по оси Z в метрах, указанное как десятичный скаляр. По умолчанию: |
Sensors (Camera) - Размещение датчика камеры, внутренние параметры камеры и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте в сценарий хотя бы один датчик камеры, выполнив следующие действия:
На панели инструментов приложения щелкните Добавить камеру.
На вкладке «Датчики» выберите датчик из списка. Значения параметров на этой вкладке основаны на выбранном датчике.
| Параметр | Описание |
|---|---|
| Позволенный | Включение или отключение выбранного датчика. Выберите этот параметр для сбора данных датчика во время моделирования и визуализации этих данных на панели «График птичьего глаза». |
| Имя | Наименование датчика. |
| Интервал обновления (мс) | Частота обновления датчика (в миллисекундах), указанная в параметре Sample Time (ms) как целое число, кратное времени выборки приложения, определенному в разделе Settings. Значение интервала обновления по умолчанию (мс), равное Если вы обновите время выборки приложения таким образом, чтобы датчик больше не был кратным времени выборки приложения, приложение предложит вам автоматически обновить параметр Интервал обновления (мс) до ближайшего целого кратного. По умолчанию: |
| Напечатать | Тип датчика, указанный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация камерыЭти параметры используются для установки положения и ориентации выбранного датчика камеры.
| Параметр | Описание |
|---|---|
| X (м) | Положение датчика по оси X в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Y (м) | Положение датчика по оси Y в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось Y указывает влево от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Высота (м) | Высота датчика над землей, в метрах, заданная как положительный десятичный скаляр. |
| Крен (°) | Угол ориентации датчика относительно его оси X в градусах, заданный как десятичный скаляр. Крен (°) положителен по часовой стрелке при взгляде в прямом направлении оси X, которая указывает вперед от датчика. |
| Шаг (°) | Угол ориентации датчика относительно его оси Y в градусах, заданный как десятичный скаляр. Шаг (°) положителен по часовой стрелке при взгляде в прямом направлении оси Y, которая указывает влево от датчика. |
| Рыскание (°) | Угол ориентации датчика относительно его оси Z в градусах, заданный как десятичный скаляр. Yaw (°) является положительной по часовой стрелке при взгляде в прямом направлении оси Z, которая указывает вверх от земли. Полотно сенсора имеет вид с высоты птичьего полета, который смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом холсте Yaw (°) против часовой стрелки является положительным. |
Camera Settings - Внутренние параметры камерыЭти параметры используются для установки внутренних параметров датчика камеры.
| Параметр | Описание |
|---|---|
| Фокусное расстояние X | Горизонтальная точка, в которой камера находится в фокусе, в пикселях, заданная как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от расположения датчика на эго-транспортном средстве. |
| Фокусное расстояние Y | Вертикальная точка, в которой камера находится в фокусе, в пикселях, заданная как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от расположения датчика на эго-транспортном средстве. |
| Ширина изображения | Разрешение камеры по горизонтали в пикселях, указанное как положительное целое число. По умолчанию: |
| Высота изображения | Вертикальное разрешение камеры в пикселях, указанное как положительное целое число. По умолчанию: |
| Главная точка X | Центр горизонтального изображения в пикселях, заданный как положительный десятичный скаляр. По умолчанию: |
| Главная точка Y | Вертикальный центр изображения в пикселях, заданный как положительный десятичный скаляр. По умолчанию: |
Sensor Parameters - Параметры обнаружения камерыЧтобы просмотреть все параметры обнаружения камеры в приложении, разверните разделы «Пределы датчика», «Параметры полосы движения» и «Параметры точности и шума».
| Параметр | Описание |
|---|---|
| Тип обнаружения | Тип обнаружений, сообщаемых камерой, определяется как одно из следующих значений:
По умолчанию: |
| Вероятность обнаружения | Вероятность того, что камера обнаружит объект, указанный как десятичный скаляр в диапазоне (0, 1]. По умолчанию: |
| Ложные положительные результаты на изображение | Число ложных срабатываний за интервал обновления, указанное как неотрицательный десятичный скаляр. Это значение должно быть меньше или равно максимальному количеству обнаружений, указанному в параметре Limit # of Detections. По умолчанию: |
| Предельное число обнаружений | Выберите этот параметр, чтобы ограничить число одновременных обнаружений объектов, о которых сообщает датчик. Укажите максимальное число обнаружений как положительное целое число меньше 263. Чтобы включить этот параметр, задайте для параметра Detection Type значение По умолчанию: |
| Координаты обнаружения | Система координат местоположений обнаружения выхода, заданная как одно из следующих значений:
По умолчанию: |
Пределы сенсора
| Параметр | Описание |
|---|---|
| Максимальная скорость (м/с) | Самая быстрая относительная скорость, с которой камера может обнаруживать объекты, в метрах в секунду, заданная как неотрицательный десятичный скаляр. По умолчанию: |
| Макс. диапазон (м) | Самое дальнее расстояние, на котором камера может обнаруживать объекты, в метрах, указанное как положительный десятичный скаляр. По умолчанию: |
| Макс. разрешенная окклюзия | Максимальный процент объекта, который может быть заблокирован при обнаружении, указан как десятичный скаляр в диапазоне [0, 1). По умолчанию: |
| Минимальная ширина изображения объекта | Минимальный размер объектов по горизонтали, который камера может обнаружить в пикселях, указанных как положительный десятичный скаляр. По умолчанию: |
| Минимальная высота изображения объекта | Минимальный вертикальный размер объектов, которые камера может обнаружить, в пикселях, указанный как положительный десятичный скаляр. По умолчанию: |
Параметры полосы движения
| Параметр | Описание |
|---|---|
| Интервал обновления полосы движения (мс) | Частота, с которой датчик обновляет обнаруженные дорожки в миллисекундах, заданная как десятичный скаляр. По умолчанию: |
| Минимальная ширина изображения полосы движения | Минимальный размер объектов по горизонтали, который датчик может обнаружить в пикселях, указанных как десятичный скаляр. Чтобы включить этот параметр, задайте для параметра Detection Type значение По умолчанию: |
| Минимальная высота изображения полосы движения | Минимальный вертикальный размер объектов, которые датчик может обнаружить в пикселях, указанных как десятичный скаляр. Чтобы включить этот параметр, задайте для параметра Detection Type значение По умолчанию: |
| Точность границ | Точность, с которой датчик размещает границу полосы в пикселях, заданную как десятичный скаляр. Чтобы включить этот параметр, задайте для параметра Detection Type значение По умолчанию: |
| Предельное число полос движения | Выберите этот параметр, чтобы ограничить количество обнаружений полосы движения, о которых сообщает датчик. Укажите «Предел # полос» как положительное целое число. Чтобы включить этот параметр, задайте для параметра Detection Type значение По умолчанию: |
Настройки точности и шума
| Параметр | Описание |
|---|---|
| Точность ограничивающей рамки | Позиционный шум, используемый для подгонки ограничивающих рамок к целям, в пикселях, заданных как положительный десятичный скаляр. По умолчанию: |
| Интенсивность технологического шума (м/с ^ 2) | Интенсивность шума, используемая для сглаживания измерений положения и скорости, в метрах в секунду в квадрате, заданная как положительный десятичный скаляр. По умолчанию: |
| Имеет шум | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
Sensors (Radar) - Параметры размещения и обнаружения датчиков РЛСЧтобы получить доступ к этим параметрам, добавьте в сценарий хотя бы один радиолокационный датчик.
На панели инструментов приложения щелкните Добавить радар.
На вкладке «Датчики» выберите датчик из списка. Значения параметров изменяются в зависимости от выбранного датчика.
| Параметр | Описание |
|---|---|
| Позволенный | Включение или отключение выбранного датчика. Выберите этот параметр для сбора данных датчика во время моделирования и визуализации этих данных на панели «График птичьего глаза». |
| Имя | Наименование датчика. |
| Интервал обновления (мс) | Частота обновления датчика (в миллисекундах), указанная в параметре Sample Time (ms) как целое число, кратное времени выборки приложения, определенному в разделе Settings. Значение интервала обновления по умолчанию (мс), равное Если вы обновите время выборки приложения таким образом, чтобы датчик больше не был кратным времени выборки приложения, приложение предложит вам автоматически обновить параметр Интервал обновления (мс) до ближайшего целого кратного. По умолчанию: |
| Напечатать | Тип датчика, указанный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация РЛСЭти параметры используются для задания положения и ориентации выбранного радиолокационного датчика.
| Параметр | Описание |
|---|---|
| X (м) | Положение датчика по оси X в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Y (м) | Положение датчика по оси Y в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось Y указывает влево от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Высота (м) | Высота датчика над землей, в метрах, заданная как положительный десятичный скаляр. |
| Крен (°) | Угол ориентации датчика относительно его оси X в градусах, заданный как десятичный скаляр. Крен (°) положителен по часовой стрелке при взгляде в прямом направлении оси X, которая указывает вперед от датчика. |
| Шаг (°) | Угол ориентации датчика относительно его оси Y в градусах, заданный как десятичный скаляр. Шаг (°) положителен по часовой стрелке при взгляде в прямом направлении оси Y, которая указывает влево от датчика. |
| Рыскание (°) | Угол ориентации датчика относительно его оси Z в градусах, заданный как десятичный скаляр. Yaw (°) является положительной по часовой стрелке при взгляде в прямом направлении оси Z, которая указывает вверх от земли. Полотно сенсора имеет вид с высоты птичьего полета, который смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом холсте Yaw (°) против часовой стрелки является положительным. |
Sensor Parameters - Параметры радиолокационного обнаруженияЧтобы просмотреть все параметры радиолокационного обнаружения в приложении, разверните разделы Дополнительные параметры и настройки точности и шума.
| Параметр | Описание |
|---|---|
| Вероятность обнаружения | Вероятность того, что радар обнаружит объект, заданный как десятичный скаляр в диапазоне (0, 1]. По умолчанию: |
| Частота ложных аварийных сигналов | Вероятность ложного обнаружения на частоту разрешения, заданную как десятичный скаляр в диапазоне [1e-07, 1e-03]. По умолчанию: |
| Азимут поля зрения | Горизонтальное поле зрения РЛС в градусах, указанное как положительный десятичный скаляр. По умолчанию: |
| Отметка поля обзора | Вертикальное поле зрения РЛС в градусах, указанное как положительный десятичный скаляр. По умолчанию: |
| Макс. диапазон (м) | Самое дальнее расстояние, на котором радар может обнаруживать объекты, в метрах, указанное как положительный десятичный скаляр. По умолчанию: |
| Минимальная скорость диапазона, максимальная скорость диапазона | Выберите этот параметр для установки минимальных и максимальных пределов дальности для РЛС. В качестве десятичных скаляров укажите Range Rate Min и Range Rate Max в метрах в секунду, где Range Rate Min меньше Range Rate Max. По умолчанию (мин.): По умолчанию (макс.): |
| Имеет отметку | Выберите этот параметр, чтобы РЛС могла измерять отметку объектов. Этот параметр включает параметры отметки в разделе «Параметры точности и шума». По умолчанию: |
| Имеет окклюзию | Выберите этот параметр, чтобы РЛС могла моделировать окклюзию. По умолчанию: |
Дополнительные параметры
| Параметр | Описание |
|---|---|
| Опорный диапазон | Опорный диапазон для данной вероятности обнаружения в метрах, указанный как положительный десятичный скаляр. Опорная дальность - это дальность, в которой радар обнаруживает цель размера, заданного эталонной RCS, учитывая вероятность обнаружения, заданную вероятностью обнаружения. По умолчанию: |
| Справочная RCS | Опорная RCS для данной вероятности обнаружения, в децибелах на квадратный метр, заданная как неотрицательный десятичный скаляр. Опорная RCS - это размер цели, при котором радар обнаруживает цель, учитывая опорный диапазон, заданный опорным диапазоном, и вероятность обнаружения, заданную вероятностью обнаружения. По умолчанию: |
| Предельное число обнаружений | Выберите этот параметр, чтобы ограничить число одновременных обнаружений, о которых сообщает датчик. Укажите максимальное число обнаружений как положительное целое число меньше 263. По умолчанию: |
| Координаты обнаружения | Система координат местоположений обнаружения выхода, заданная как одно из следующих значений:
По умолчанию: |
Настройки точности и шума
| Параметр | Описание |
|---|---|
| Разрешение по азимуту | Минимальное разделение по азимутальному углу, при котором РЛС может различать две цели в градусах, указанных как положительный десятичный скаляр. Разрешение по азимуту обычно представляет собой нисходящую точку 3 дБ в диапазоне азимутальных углов луча радара. По умолчанию: |
| Доля смещения азимута | Максимальная азимутальная точность РЛС, заданная как неотрицательный десятичный скаляр. Смещение по азимуту выражается как доля разрешения по азимуту, заданного параметром Azimuth Resolution. Единицы измерения безразмерны. По умолчанию: |
| Разрешение отметок | Минимальное разделение по углу места, при котором РЛС может различать две цели, в градусах, указанных как положительный десятичный скаляр. Разрешение возвышения обычно представляет собой точку опускания 3 дБ в диапазоне углов возвышения радара. Для включения этого параметра в разделе «Параметры датчика» выберите параметр «Имеет отметку». По умолчанию: |
| Доля смещения по отметке | Максимальная точность возвышения РЛС, заданная как неотрицательный десятичный скаляр. Смещение по отметке выражается как часть разрешения по отметке, заданного параметром «Разрешение по отметке». Единицы измерения безразмерны. Чтобы включить этот параметр, в разделе «Параметры датчика» выберите параметр «Имеет отметку». По умолчанию: |
| Разрешение диапазона | Минимальное разделение дальности, при котором РЛС может различать две цели, в метрах, задаваемое как положительный десятичный скаляр. По умолчанию: |
| Фракция смещения диапазона | Максимальная дальностная точность РЛС, заданная как неотрицательный десятичный скаляр. Смещение диапазона выражается как часть разрешения диапазона, указанного в параметре Range Resolution. Единицы измерения безразмерны. По умолчанию: |
| Разрешение скорости диапазона | Минимальное разделение дальности, при котором РЛС может различать две цели, в метрах в секунду, задаваемое как положительный десятичный скаляр. Чтобы включить этот параметр, в разделе Sensor Parameters выберите параметр Range Rate Min, Range Rate Max и задайте значения скорости диапазона. По умолчанию: |
| Доля смещения скорости диапазона | Максимальная дальностная точность РЛС, заданная как неотрицательный десятичный скаляр. Смещение скорости диапазона выражается как часть разрешения скорости диапазона, указанного в параметре Range Rate Resolution. Единицы измерения безразмерны. Чтобы включить этот параметр, в разделе Sensor Parameters выберите параметр Range Rate Min, Range Rate Max и задайте значения скорости диапазона. По умолчанию: |
| Имеет шум | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
| Имеет ложные аварийные сигналы | Выберите этот параметр для включения ложных аварийных сигналов при обнаружении датчиков. По умолчанию: |
Sensors (Lidar) - Размещение датчика Lidar, создание отчетов о облаке точек и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте в сценарий хотя бы один лидарный датчик.
На панели инструментов приложения щелкните Добавить лидар.
На вкладке «Датчики» выберите датчик из списка. Значения параметров изменяются в зависимости от выбранного датчика.
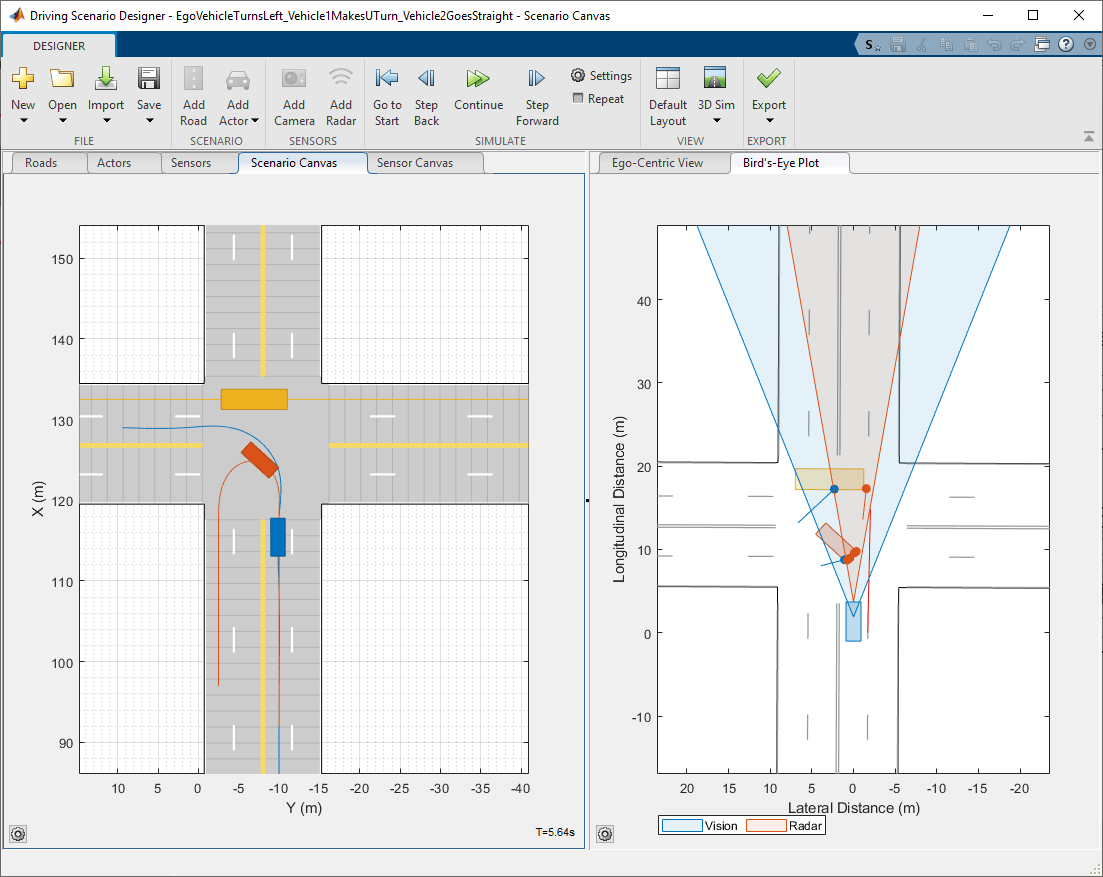
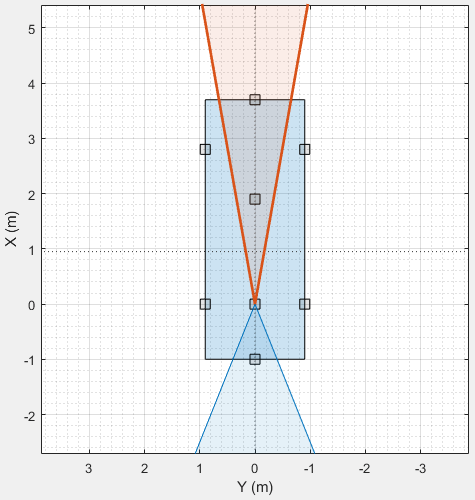
Когда Вы добавляете, что датчик лидара к сценарию, Видимому с большого расстояния Сюжету и Эгоцентрическому Представлению показывает сетчатые представления актеров. Например, вот пример представления сетей актера в Ego-Centric View.
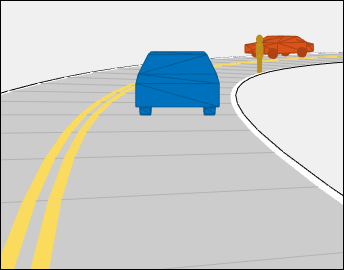
Лидарные датчики используют эти более подробные представления субъектов для генерации данных облака точек. Холст сценария по-прежнему отображает только кубовидные представления. Другие датчики все еще основывают свои обнаружения на кубоидных представлениях.
Чтобы отключить сети актера, используйте свойства в разделе Отображение на панели инструментов приложения. Чтобы изменить типы отображения сетки актёров, выберите «Добавить актера» > «Редактировать классы актёров». В редакторе классов измените параметр «Тип отображения сетки» для этого класса акторов.
| Параметр | Описание |
|---|---|
| Позволенный | Включение или отключение выбранного датчика. Выберите этот параметр для сбора данных датчика во время моделирования и визуализации этих данных на панели «График птичьего глаза». |
| Имя | Наименование датчика. |
| Интервал обновления (мс) | Частота обновления датчика (в миллисекундах), указанная в параметре Sample Time (ms) как целое число, кратное времени выборки приложения, определенному в разделе Settings. Значение интервала обновления по умолчанию (мс), равное Если вы обновите время выборки приложения таким образом, чтобы датчик больше не был кратным времени выборки приложения, приложение предложит вам автоматически обновить параметр Интервал обновления (мс) до ближайшего целого кратного. По умолчанию: |
| Напечатать | Тип датчика, указанный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация лидараЭти параметры используются для установки положения и ориентации выбранного лидарного датчика.
| Параметр | Описание |
|---|---|
| X (м) | Положение датчика по оси X в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Y (м) | Положение датчика по оси Y в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось Y указывает влево от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Высота (м) | Высота датчика над землей, в метрах, заданная как положительный десятичный скаляр. |
| Крен (°) | Угол ориентации датчика относительно его оси X в градусах, заданный как десятичный скаляр. Крен (°) положителен по часовой стрелке при взгляде в прямом направлении оси X, которая указывает вперед от датчика. |
| Шаг (°) | Угол ориентации датчика относительно его оси Y в градусах, заданный как десятичный скаляр. Шаг (°) положителен по часовой стрелке при взгляде в прямом направлении оси Y, которая указывает влево от датчика. |
| Рыскание (°) | Угол ориентации датчика относительно его оси Z в градусах, заданный как десятичный скаляр. Yaw (°) является положительной по часовой стрелке при взгляде в прямом направлении оси Z, которая указывает вверх от земли. Полотно сенсора имеет вид с высоты птичьего полета, который смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом холсте Yaw (°) против часовой стрелки является положительным. |
Point Cloud Reporting - Параметры отчетности облака точек| Параметр | Описание |
|---|---|
| Координаты обнаружения | Система координат местоположений обнаружения выхода, заданная как одно из следующих значений:
По умолчанию: |
| Вывод упорядоченных местоположений облака точек | Выберите этот параметр для вывода сгенерированных данных датчика в виде организованного облака точек. При сбросе этого параметра выходные данные будут неорганизованными. По умолчанию: |
| Включить средство ego в сформированное облако точек | Выберите этот параметр для включения транспортного средства ego в создаваемое облако точек. По умолчанию: |
| Включение дорог в сформированное облако точек | Выберите этот параметр для включения дорог в создаваемое облако точек. По умолчанию: |
Sensor Parameters - Параметры обнаружения лидараПределы сенсора
| Параметр | Описание |
|---|---|
| Макс. диапазон (м) | Самое дальнее расстояние, на котором лидар может обнаруживать объекты, в метрах, указанное как положительный десятичный скаляр. По умолчанию: |
| Точность диапазона (м) | Точность измерений дальности, в метрах, заданная как положительный десятичный скаляр. По умолчанию: |
| Азимут | Азимутальное разрешение лидарного датчика в градусах, заданное как положительный десятичный скаляр. Азимутальное разрешение определяет минимальное разделение по азимутальному углу, при котором лидар может различать две цели. По умолчанию: |
| Возвышение | Разрешение уровня лидарного датчика в градусах, указанное как положительный десятичный скаляр. Разрешение по отметке определяет минимальное разделение по углу возвышения, при котором лидар может различать две цели. По умолчанию: |
| Азимутальные пределы (град.) | Азимутальные пределы лидарного датчика в градусах, заданные как двухэлементный вектор десятичных скаляров вида По умолчанию: |
| Пределы отметок (град.) | Пределы отметки лидарного датчика в градусах, заданные как двухэлементный вектор десятичных скаляров вида По умолчанию: |
| Имеет шум | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
Sensors (INS) - размещение датчика ИНС, параметры измеренийЧтобы получить доступ к этим параметрам, добавьте в сценарий хотя бы один датчик INS, выполнив следующие действия:
На панели инструментов приложения щелкните Добавить INS.
На вкладке «Датчики» выберите датчик из списка. Значения параметров на этой вкладке основаны на выбранном датчике.
| Параметр | Описание |
|---|---|
| Позволенный | Включение или отключение выбранного датчика. Выберите этот параметр для сбора данных датчика во время моделирования и визуализации этих данных на панели «График птичьего глаза». |
| Имя | Наименование датчика. |
| Интервал обновления (мс) | Частота обновления датчика (в миллисекундах), указанная в параметре Sample Time (ms) как целое число, кратное времени выборки приложения, определенному в разделе Settings. Значение интервала обновления по умолчанию (мс), равное Если вы обновите время выборки приложения таким образом, чтобы датчик больше не был кратным времени выборки приложения, приложение предложит вам автоматически обновить параметр Интервал обновления (мс) до ближайшего целого кратного. По умолчанию: |
| Напечатать | Тип датчика, указанный как Radar, Vision, Lidar или INS. |
Sensor Placement - положение ИНСЭти параметры используются для установки положения выбранного датчика INS. Предполагается, что ориентация датчика совпадает с началом координат эго-транспортного средства, поэтому свойства крена (°), тангажа (°) и рыскания (°) для этого датчика отключены.
| Параметр | Описание |
|---|---|
| X (м) | Положение датчика по оси X в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Y (м) | Положение датчика по оси Y в системе координат транспортного средства в метрах, указанное как десятичный скаляр. Ось Y указывает влево от транспортного средства. Начало координат расположено в центре задней оси транспортного средства. |
| Высота (м) | Высота датчика над землей, в метрах, заданная как положительный десятичный скаляр. |
| Крен (°) | Угол ориентации датчика относительно его оси X в градусах, заданный как десятичный скаляр. Крен (°) положителен по часовой стрелке при взгляде в прямом направлении оси X, которая указывает вперед от датчика. |
| Шаг (°) | Угол ориентации датчика относительно его оси Y в градусах, заданный как десятичный скаляр. Шаг (°) положителен по часовой стрелке при взгляде в прямом направлении оси Y, которая указывает влево от датчика. |
| Рыскание (°) | Угол ориентации датчика относительно его оси Z в градусах, заданный как десятичный скаляр. Yaw (°) является положительной по часовой стрелке при взгляде в прямом направлении оси Z, которая указывает вверх от земли. Полотно сенсора имеет вид с высоты птичьего полета, который смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом холсте Yaw (°) против часовой стрелки является положительным. |
Sensor Parameters - параметры измерения ИНСДля получения дополнительной информации об этих параметрах см. insSensor страница ссылки на объект.
| Параметр | Описание |
|---|---|
| Точность крена (°) | Точность поворота в градусах, заданная как неотрицательный десятичный скаляр. Это значение задает стандартное отклонение шума измерения крена. По умолчанию: |
| Точность шага (°) | Точность шага в градусах, заданная как неотрицательный десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения основного тона. По умолчанию: |
| Точность рыскания (°) | Точность рыскания в градусах, заданная как неотрицательный десятичный скаляр. Это значение задает стандартное отклонение шума измерения рыскания. По умолчанию: |
| Точность положения (м) | Точность измерений x -, y - и z-положения в метрах, заданная как десятичный скаляр или трехэлементный десятичный скаляр. Это значение задает стандартное отклонение шума измерения положения. Укажите скаляр, чтобы задать точность всех трех положений для этого значения. По умолчанию: |
| Точность скорости (м/с) | Точность измерений скорости в метрах в секунду, заданная как десятичный скаляр. Это значение задает стандартное отклонение шума измерения скорости. По умолчанию: |
| Точность ускорения | Точность измерений ускорения, в метрах в секунду в квадрате, заданная как десятичный скаляр. Это значение задает стандартное отклонение шума измерения ускорения. По умолчанию: |
| Точность угловой скорости | Точность измерений угловой скорости в градусах в секунду, заданная как десятичный скаляр. Это значение задает стандартное отклонение шума измерения угловой скорости. По умолчанию: |
| Имеет исправление GNSS | Включить фиксацию приемника глобальной навигационной спутниковой системы (ГНСС). Если этот параметр снят, то измерения положения дрейфа с частотой, заданной параметром Коэффициент ошибки положения (Position Error Factor). По умолчанию: |
| Коэффициент ошибки положения | Коэффициент ошибки положения без исправления GNSS, определяемый как неотрицательный десятичный скаляр или десятичный вектор 1 на 3. По умолчанию: |
| Случайный поток | Источник потока случайных чисел, указанный как один из следующих вариантов:
По умолчанию: |
| Семя | Начальное начальное число алгоритма генератора случайных чисел mt19937ar, указанное как неотрицательное целое число. По умолчанию: |
Settings - Время образца моделирования, условие остановки и время остановкиЧтобы получить доступ к этим параметрам, на панели инструментов приложения щелкните Параметры.
| Параметр | Описание |
|---|---|
| Время выборки (мс) | Частота обновления моделирования в миллисекундах. Увеличение времени выборки для ускорения моделирования. Это увеличение не влияет на скорости актера, даже несмотря на то, что актёры могут работать быстрее во время моделирования. Позиции актера только что отбираются и отображаются в приложении с менее частыми интервалами, что приводит к более быстрой анимации шоппье. Уменьшение времени выборки приводит к более плавной анимации, но актеры двигаются медленнее, и моделирование занимает больше времени. Время выборки не коррелирует с фактическим временем. Например, если приложение выполняет выборку каждые 0,1 секунды (Sample Time (ms) = По умолчанию: |
| Условие остановки | Остановить условие моделирования, указанное как одно из следующих значений:
По умолчанию: |
| Время (ы) остановки | Время остановки моделирования в секундах, указанное как положительный десятичный скаляр. Чтобы включить этот параметр, установите для параметра Stop Condition значение По умолчанию: |
| Использовать начальное значение RNG | Выберите этот параметр, чтобы использовать начальное число генератора случайных чисел (RNG) для воспроизведения одних и тех же результатов для каждого моделирования. Укажите начальное число RNG как неотрицательное целое число меньше 232. По умолчанию: |
Ограничения на импорт/экспорт датчиков
При импорте drivingRadarDataGenerator датчик, который сообщает о кластерных обнаружениях или отслеживает в приложении, а затем экспортирует датчик в MATLAB или Simulink, экспортируемый объект датчика или блок сообщает о некластеризованных обнаружениях. Это изменение формата отчетов происходит потому, что приложение поддерживает только генерацию незасекреченных обнаружений.
Экспорт датчиков INS в Simulink не поддерживается. При экспорте сценария, содержащего датчики INS, в Simulink эти датчики не включаются в создаваемую модель.
OpenStreetMap - ограничения импорта
При импорте данных OpenStreetMap функции дорог и полос движения имеют следующие ограничения:
Информация на уровне полос не импортируется с дорог OpenStreetMap. Спецификации полосы движения основаны только на направлении движения, указанном в дорожной сети OpenStreetMap, где:
Односторонние дороги импортируются как однополосные дороги со спецификациями полос по умолчанию. Эти полосы программно эквивалентны lanespec(1).
Двухсторонние дороги импортируются как двухполосные дороги с двусторонним движением и спецификациями полос по умолчанию. Эти полосы программно эквивалентны lanespec([1 1]).
В таблице показаны эти различия в дорожной сети OpenStreetMap и дорожной сети в импортированном сценарии вождения.
| Дорожная сеть OpenStreetMap | Импортированный сценарий управления |
|---|---|
|
|
При импорте дорожных сетей OpenStreetMap, которые задают данные об отметках, если данные об отметках не указаны для всех импортируемых дорог, то созданная дорожная сеть может содержать неточности и некоторые дороги могут перекрываться.
Базовая карта, используемая в приложении, может иметь небольшие отличия от карты, используемой в сервисе OpenStreetMap. Некоторые импортированные дорожные проблемы также могут быть связаны с отсутствующими или неточными данными карты в сервисе OpenStreetMap. Чтобы проверить отсутствие или неточность данных из-за службы карты, рассмотрите возможность просмотра данных карты во внешнем средстве просмотра карт.
Если выдается предупреждение о невозможности вычисления геометрии дороги, кривизна дороги слишком резка, чтобы ее можно было правильно визуализировать, и она не импортируется.
HERE HD Live Map - Ограничения импорта
Импорт HERE HDLM дорог с полосами различной ширины не поддерживается. В создаваемой дорожной сети для каждой полосы устанавливается максимальная ширина по всей ее длине. Рассмотрим полосу HERE HDLM шириной от 2 до 4 метров вдоль ее длины. В сформированной дорожной сети ширина полосы составляет 4 метра по всей её длине. Это изменение дорожных сетей иногда может привести к перекрытию дорог в сценарии вождения.
Если выдается предупреждение о невозможности вычисления геометрии дороги, кривизна дороги слишком резка, чтобы ее можно было правильно визуализировать, и она не импортируется.
Базовая карта, используемая в приложении, может иметь небольшие отличия от карты, используемой в службе HERE HDLM.
Некоторые проблемы с импортируемыми дорогами могут быть связаны с отсутствием или неточностью данных карты в службе HERE HDLM. Например, можно увидеть черные линии, где встречаются дороги и перекрестки. Чтобы проверить, откуда возникает проблема в данных карты, используйте HERE HD Live Map Viewer для просмотра геометрии дорожной сети HERE HDLM. Для просмотра требуется действительная лицензия HERE. Дополнительные сведения см. на сайте HERE Technologies.
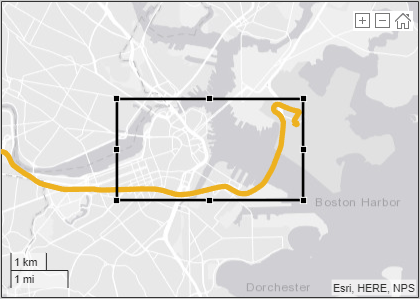
HERE HD Live Map - Ограничения выбора маршрута
При выборе дорог HERE HD Live Map для импорта из интересующего региона максимально допустимый размер региона составляет 20 квадратных километров. Если вы указываете маршрут движения, превышающий 20 квадратных километров, приложение рисует область, оптимизированную для размещения на дисплее как можно большей части начала маршрута. На этом рисунке показан пример области вокруг начала трассы, размер которой превышает этот максимальный размер.
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) - Ограничения импорта
При импорте данных Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) создаваемая дорожная сеть имеет эти ограничения. В результате этих ограничений создаваемая сеть может содержать неточности, а дороги могут перекрываться.
Создаваемая дорожная сеть использует данные об отметке дороги, когда ее предоставляет Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0). В противном случае создаваемая сеть использует данные об отметке рельефа местности, предоставляемые службой.
Когда служба Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) предоставляет информацию с использованием диапазона, например, путем указания дороги с двумя-тремя полосами или дороги шириной от 3 до 5,5 метров, генерируемая дорожная сеть использует вместо этого скалярные значения. Рассмотрим дорогу Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0), которая имеет от двух до трех полос. Сформированная дорожная сеть имеет две полосы движения.
Полосы движения в пределах дорог в создаваемой сети имеют одинаковую ширину. Рассмотрим дорогу шириной 4,25 метра с двумя полосами. В сформированной дорожной сети ширина каждой полосы составляет 2,125 метра.
Если выдается предупреждение о невозможности вычисления геометрии дороги, кривизна дороги слишком резка, чтобы ее можно было правильно визуализировать, и она не импортируется.
По возможности в создаваемой дорожной сети используются названия дорог, предоставляемые службой Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0). В противном случае в создаваемой дорожной сети используются имена по умолчанию, например Road1 и Road2.
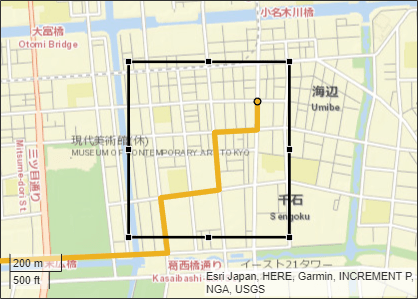
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) - Ограничения выбора маршрута
При выборе дорог Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) для импорта из интересующего региона максимально допустимый размер региона составляет 500 квадратных метров. Если вы указываете маршрут движения, превышающий 500 квадратных метров, приложение рисует область, оптимизированную для размещения на дисплее как можно большей части начала маршрута. На этом рисунке показан пример области вокруг начала трассы, размер которой превышает этот максимальный размер.
Ограничения импорта OpenDRIVE
Можно импортировать только полосы движения, информацию о типах полос и дороги. Импорт дорожных объектов и сигналов дорожного движения не поддерживается.
Загрузка файлов OpenDRIVE, содержащих большие дорожные сети, может занять до нескольких минут. Кроме того, эти дорожные сети могут вызывать медленное взаимодействие на холсте приложения. Примеры крупных дорожных сетей включают в себя те, которые моделируют дороги города или дороги с длиной тысячи метров.
Полосы с переменной шириной не поддерживаются. Для ширины задается наибольшая ширина в пределах этой полосы. Например, если ширина полосы варьируется от 2 до 4 метров, приложение устанавливает ширину полосы в 4 метра.
Дороги с информацией о типе полосы движения, указанной как driving, border, restricted, shoulder, и parking поддерживаются. Полосы движения с любой другой информацией о типах полос движения импортируются как пограничные полосы.
Дороги со стилями разметки нескольких полос, указанными как 'Unmarked', 'Solid', 'DoubleSolid', 'Dashed', 'DoubleDashed', 'SolidDashed', и 'DashedSolid' поддерживаются.
Стили разметки полос движения Bott Dots, Curbs, и Grass не поддерживаются. Полосы с этими стилями разметки импортируются как немаркированные.
Ограничения экспорта OpenDRIVE
Кубический многочлен и параметрические типы геометрии кубического многочлена в сценарии экспортируются как типы геометрии переходной кривой. Это приводит к некоторым изменениям в геометрии экспортируемой дороги, если дорога представляет собой криволинейную дорогу.
Когда сегменты соседних дорог перекрываются друг с другом, приложение не экспортирует перекрывающиеся сегменты дорог.
Если дорога со спецификациями нескольких полос имеет любой сегмент, содержащий только одну полосу, приложение не экспортирует спецификации нескольких полос. Вместо этого спецификации первого сегмента дороги применяются ко всей дороге во время экспорта.
Если дорога с несколькими спецификациями полос содержит конусность между двумя сегментами дороги, приложение экспортирует дорогу без конусности.
Когда дорога, состоящая из нескольких сегментов, подключена к разъезду, приложение не экспортирует дорогу.
Соединения дорожной сети обрабатываются без информации о соединении полос, поэтому формы соединений могут быть неточными в экспортируемом сценарии.
Приложение не экспортирует какого-либо актера, присутствующего либо на развязке, либо на дороге с несколькими сегментами дороги.
Ограничения Euro NCAP
Сценарии систем помощи скорости (SAS) не поддерживаются. Эти сценарии требуют обнаружения ограничений скорости от дорожных знаков, которые приложение не поддерживает.
3D Ограничения отображения
Эти ограничения описывают, как 3D визуализация Показа отличается от cuboid визуализации, которая появляется на Холсте Сценария.
Дороги не образуют развязок с немаркированными полосами на перекрестках. Дороги и их разметка полос перекрываются.
Поддерживаются не все цвета разметки актера или полосы движения. Отображение 3D соответствует выбранному цвету, наиболее близкому к доступному для визуализации.
Не поддерживаются цвета типа полосы движения для полос, не ведущих движение. При выборе типа полосы движения без движения в окне отображения 3D полоса движения отображается как полоса движения.
На вкладке Actors указанные значения параметров Rolle (°) и Pitch (°) актера игнорируются. В таблице «ППМ» значения z (m) (то есть значения отметок) также игнорируются. Во время моделирования актеры следят за высотой и углом наклона поверхности дороги.
Несколько стилей разметки вдоль полосы не поддерживаются. При отображении 3D применяется первый стиль разметки полосы первого сегмента полосы вдоль всей длины полосы.
Актеры с 3D типом отображения Cuboid не перемещайтесь на 3D дисплее. Во время моделирования эти актеры остаются неподвижными на своих начальных заданных позициях.
В сценариях вождения актёром является кубовидный (коробчатый) объект с определёнными длиной, шириной и высотой. Актеры также имеют схему радиолокационного сечения (RCS), заданную в дБсм, которую можно уточнить, задав угловые координаты азимута и отметки. Положение актера определяется как центр его нижней грани. Эта центральная точка используется в качестве центра вращения актера, точки контакта с землей и начала координат в локальной системе координат. В этой системе координат:
Ось X указывает вперед от актера.
Точки оси Y, оставшиеся от актера.
Ось Z указывает вверх от земли.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в прямом направлении осей X, Y и Z соответственно.
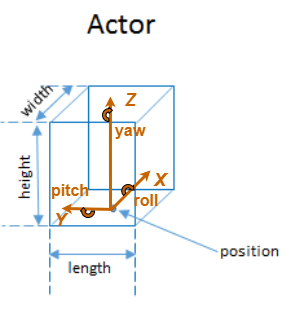
Транспортное средство - это актер, который передвигается на колесах. Транспортные средства обладают тремя дополнительными свойствами, регулирующими расположение их передней и задней осей.
Колесная база - расстояние между передней и задней осями
Передний свес - расстояние между передней частью транспортного средства и передней осью
Задний свес - расстояние между задней осью и задней частью транспортного средства
В отличие от других типов действующих лиц, положение транспортного средства определяется точкой на земле, которая находится ниже центра его задней оси. Эта точка соответствует естественному центру вращения транспортного средства. Как и в случае транспортных средств, эта точка является началом координат в локальной системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Точки оси Y, оставшиеся от транспортного средства.
Ось Z указывает вверх от земли.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в прямом направлении осей X, Y и Z соответственно.
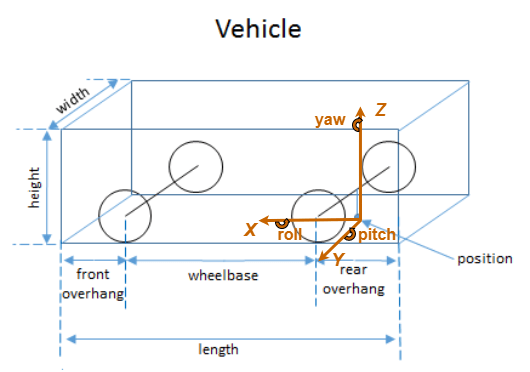
Происхождение (то есть положение) кубовидных транспортных средств отличается от происхождения транспортных средств в среде моделирования 3D. В среде моделирования 3D происхождение транспортного средства находится на земле в геометрическом центре транспортного средства.
| Cuboid Vehicle Origin ( | 3D Происхождение имитационного транспортного средства |
|---|---|
|
|
Для несосудистых актёров истоки идентичны и расположены в нижней части геометрического центра актёров.
В Simulink для преобразования транспортного средства из начала координат кубов в начало координат моделирования 3D используется блок «Cuboid To 3D Simulation». Дополнительные сведения о координатах 3D моделирования см. в разделе Системы координат для моделирования нереального двигателя в автоматизированной панели инструментов вождения.
В этой таблице перечислены параметры именованного цвета, эквивалентные триплеты RGB и шестнадцатеричные цветовые коды, которые можно использовать для задания цвета полос движения и разметки на дороге.
| Имя цвета | Краткое имя | Триплет RGB | Шестнадцатеричный цветовой код | Внешность |
|---|---|---|---|---|
red | r | [1 0 0] | #FF0000 |
|
green | g | [0 1 0] | #00FF00 |
|
blue | b | [0 0 1] | #0000FF |
|
cyan
| c | [0 1 1] | #00FFFF |
|
magenta | m | [1 0 1] | #FF00FF |
|
yellow | y | [0.98 0.86 0.36] | #FADB5C |
|
black | k | [0 0 0] | #000000 |
|
white | w | [1 1 1] | #FFFFFF |
|
Создание дороги с помощью road укажите центры дорог в качестве ввода матрицы. Функция создает направленную линию, пересекающую центры дорог, начиная от координат в первой строке матрицы и заканчивая координатами в последней строке матрицы. Координаты в первых двух строках матрицы определяют направление прорисовки дороги. Эти координаты соответствуют первым двум последовательным дорожным центрам. Направление рисования - это направление, в котором дороги визуализируются на графике сценария.
Чтобы создать дорогу с помощью приложения «Конструктор сценариев вождения», можно либо указать параметр «Центры дорог», либо в интерактивном режиме нарисовать на холсте сценария. Подробный пример см. в разделе Создание сценария управления. В этом случае направление прорисовки - это направление, в котором тонируются дороги в холсте «Сценарий».
Для дороги с направлением прорисовки сверху вниз разница между координатами X первых двух последовательных центров дороги является положительной.
Для дороги с направлением прорисовки снизу вверх разница между координатами X первых двух последовательных центров дороги отрицательна.
|
|
|
Для дороги с направлением прорисовки слева направо разница между координатами y первых двух последовательных центров дороги является положительной.
Для дороги с направлением прорисовки справа налево разница между координатами y первых двух последовательных центров дороги отрицательна.
|
|
|
Полосы движения должны нумероваться слева направо, при этом левый край дороги определяется относительно направления прорисовки дороги. Для дороги с односторонним движением по умолчанию левый край дороги представляет собой сплошную желтую разметку, которая указывает конец дороги в поперечном направлении (направлении, перпендикулярном направлению рисования). Для дороги с двусторонним движением по умолчанию обе кромки отмечены сплошными белыми линиями.
Например, на этих диаграммах показано, как полосы пронумерованы на дороге с односторонним и двусторонним движением с направлением вытягивания сверху вниз.
| Нумерация полос в дороге с односторонним движением | Нумерация полос движения в двухсторонней дороге |
Укажите количество полос движения как положительное целое число для дороги с односторонним движением. Если целочисленное значение задано как 1, 2, 3 обозначают первую, вторую и третью полосы дороги соответственно.
| Укажите количество полос движения в виде двухэлементного вектора положительного целого числа для дороги с двусторонним движением. Если установить вектор как [ 1L обозначают единственную левую полосу дороги. 1R и 2R обозначают первую и вторую правую полосы дороги соответственно.
|
Спецификации полос применяются в порядке нумерации полос.
Составная разметка полосы содержит два или более маркерных сегмента, которые определяют несколько типов разметки вдоль полосы. Геометрические свойства составной разметки полосы движения включают геометрические свойства каждого типа разметки и нормализованные длины сегментов маркера.
Порядок расположения указанных сегментов маркера в составной разметке полосы зависит от направления прорисовки дороги. Каждый сегмент маркера представляет собой направленный сегмент с начальной точкой и перемещается к центру последней дороги. Первый сегмент маркера начинается от первого центра дороги и перемещается к последнему центру дороги на заданную длину. Второй сегмент маркера начинается от конечной точки первого сегмента маркера и перемещается к центру последней дороги на заданную длину. Такой же процесс применяется к каждому сегменту маркера, заданному для составной разметки полосы движения. Нормализованную длину для каждого из этих сегментов маркера можно задать, указав range входной аргумент.
Например, рассмотрим одностороннюю дорогу с двумя полосами. Вторая разметка полосы движения с левого края дороги представляет собой составную разметку полосы движения с типами разметки Solid и Dashed. Нормированный диапазон для каждого типа маркировки составляет 0,5. Первый сегмент маркера представляет собой сплошную маркировку, а второй сегмент маркера представляет собой пунктирную маркировку. На этих диаграммах показан порядок, в котором сегменты маркера применяются к направлениям рисования дороги слева направо и справа налево.
|
|
|
Сведения о геометрических свойствах разметки полосы движения см. в разделе Спецификации полосы движения.
Составная спецификация полосы движения состоит из массива из двух или более спецификаций полосы движения для одной дороги. Каждая спецификация полосы движения определяет сегмент дороги, который представляет собой участок дороги с независимыми геометрическими свойствами, нормированным диапазоном и конусностью.
Каждый сегмент дороги представляет собой направленный сегмент, который перемещается к конечному центру дороги, причем первый сегмент начинается с первого центра дороги, второй сегмент начинается с первого конца и т.д. Диапазон каждого сегмента дороги - это нормированное расстояние, которое определяет долю от общей длины дороги. Когда дорожный сегмент добавляет или опускает полосы движения от предыдущего сегмента, предыдущий сегмент сужается на заданное расстояние, чтобы учесть изменение количества полос движения.
При тонировании дороги с составными спецификациями полос сегменты дороги тонируются в направлении прорисовки дороги. Например, рассмотрим одностороннюю дорогу с двумя сегментами дороги и нормированным диапазоном по умолчанию, равным 0,5 для каждого сегмента дороги. Первый дорожный сегмент содержит четыре полосы, а второй сегмент содержит только две полосы. Первый сегмент сужается с четырёх полос на две полосы, сбрасывая по одной полосе с каждой стороны, по мере приближения к полпути дороги, которая является начальной точкой второго сегмента. На этих диаграммах показано направление, в котором визуализируются сегменты дороги, и способ применения конусности к дороге как для направления рисования слева направо, так и для направления рисования справа налево.
|
|
|
Сведения о геометрических свойствах полос движения см. в разделе Спецификации полос движения.
При импорте данных карты указанные области карты и количество выбранных дорог оказывают непосредственное влияние на производительность приложения. Для повышения производительности укажите наименьшие области карты и выберите наименьшее количество дорог, необходимое для создания сценария вождения.
Можно отменить (нажмите Ctrl + Z) и повторить (нажмите Ctrl + Y) изменения, внесенные в сценарии и холсты датчиков. Например, эти ярлыки можно использовать для удаления недавно размещенного центра дороги или повторного перемещения радиолокационного датчика. Дополнительные комбинации клавиш см. в разделах Сочетания клавиш и Действия мыши для конструктора сценариев управления
В сценариях, содержащих множество субъектов, для отслеживания эго-транспортного средства можно добавить индикатор вокруг транспортного средства. На панели инструментов приложения выберите Отображение > Показать индикатор эго. Круг вокруг эго-транспортного средства выделяет местоположение транспортного средства в сценарии. Этот круг не является зоной действия датчика.
[1] Европейская программа оценки новых автомобилей. Протокол оценки Euro NCAP - SA. Версия 8.0.2. Январь 2018 года.
[2] Европейская программа оценки новых автомобилей. Протокол тестирования Euro NCAP AEB C2C. Версия 2.0.1. Январь 2018 года.
[3] Европейская программа оценки новых автомобилей. Протокол тестирования LSS Euro NCAP. Версия 2.0.1. Январь 2018 года.
[4] Dupuis, Marius и др. Спецификация формата OpenDRIVE. Редакция 1.4, Выпуск Н, No документа VI2014.106. Бад Айблинг, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015 г.
drivingRadarDataGenerator | drivingScenario | insSensor | lidarPointCloudGenerator | visionDetectionGenerator[1] Необходимо заключить отдельное соглашение с HERE, чтобы получить доступ к услугам HDLM и получить необходимые учетные данные (access_key_id и access_key_secret) для использования услуги HERE.
[2] Чтобы получить доступ к службе Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) и получить необходимые учетные данные (идентификатор клиента и секретный ключ), необходимо заключить отдельное соглашение с ZENRIN DataCom CO., LTD.