Имитационная модель IMU
Панель инструментов для слияния и отслеживания сенсоров/мультисенсорное позиционирование/модели сенсоров
Панель инструментов навигации/мультисенсорные модели позиционирования/сенсоры
Блок IMU Simulink ® моделирует получение данных от инерциального измерительного блока (IMU), состоящего из акселерометра, гироскопа и датчиков магнитометра.
Модель акселерометра использует входы ориентации и ускорения «земля-истина» и imuSensor и accelparams свойства для моделирования показаний акселерометра.
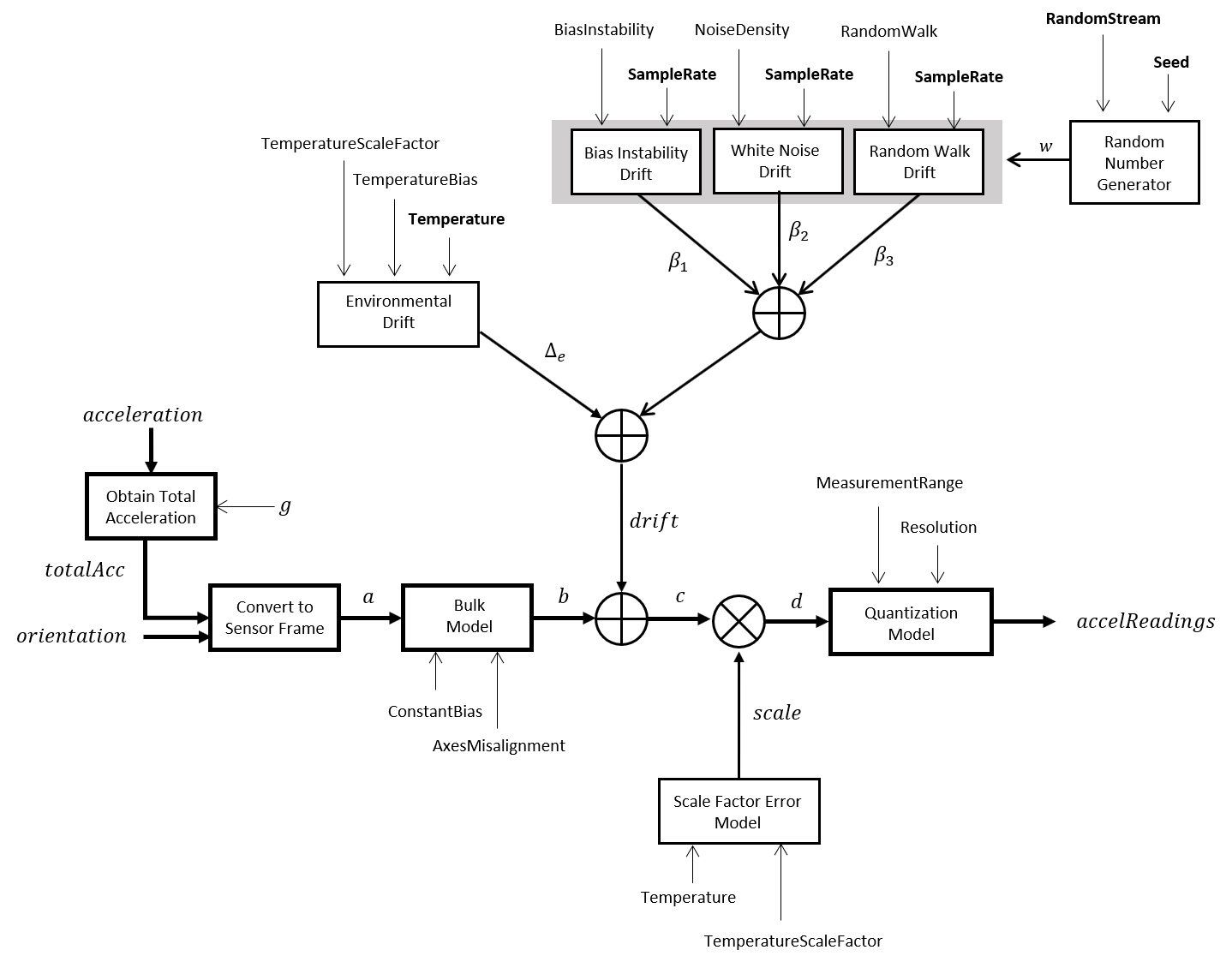
Для получения полного ускорения (totalAcc) ускорение предварительно обрабатывается отрицанием и добавлением вектора постоянной гравитации (g = [0; 0; 9,8] м/с2) в виде:
ускорение + g
Затем преобразуют суммарное ускорение из локального навигационного кадра в кадр датчика, используя:
totalAcc) T
Если ориентация вводится в форме кватерниона, она преобразуется в матрицу вращения перед обработкой.
Ускорение «земля-истина» в кадре датчика, а, проходит через объемную модель, что добавляет несовпадение осей и смещение:
ConstantBias
где ConstantBias является свойством accelparams, а α1, α2 и α3 даны первым, вторым и третьим элементами свойства Misalignment accelparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
Нестабильность)
где BiasНеустойчивость является свойством accelparams, и h1 является фильтром, определенным свойством SampleRate:
12z − 1
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
Плотность)
где SampleRate является imuSensor свойство, и NoaseDensity является accelparams собственность. Элементы w - случайные числа, задаваемые настройками imuSensor случайный поток.
Дрейф случайного хождения моделируется смещающими элементами случайного потока белого шума и затем фильтруется:
RandomWalkSampleRate2)
где RandomWalk является свойством accelparams, SampleRate является свойством imuSensor, и h2 является фильтром, определяемым как:
− z − 1
Шум дрейфа окружающей среды моделируется путем умножения разности температур из стандарта с температурным смещением:
Температура Смещение)
где Температура является свойством imuSensor, и TemperateBias является свойством accelparams. Постоянная 25 соответствует стандартной температуре.
Погрешность температурного коэффициента моделируется следующим образом:
температурный коэффициент)
где Температура является свойством imuSensor, а TemperateScityFactor является свойством accelparams. Постоянная 25 соответствует стандартной температуре.
Квантование моделируется посредством первого насыщения модели непрерывного сигнала:
а затем установите разрешение:
eResolution))
где MeasureRange является свойством accelparams.
В модели гироскопа используются входные значения ориентации «земля-истина», ускорения и угловой скорости, а также imuSensor и gyroparams свойства для моделирования показаний акселерометра.
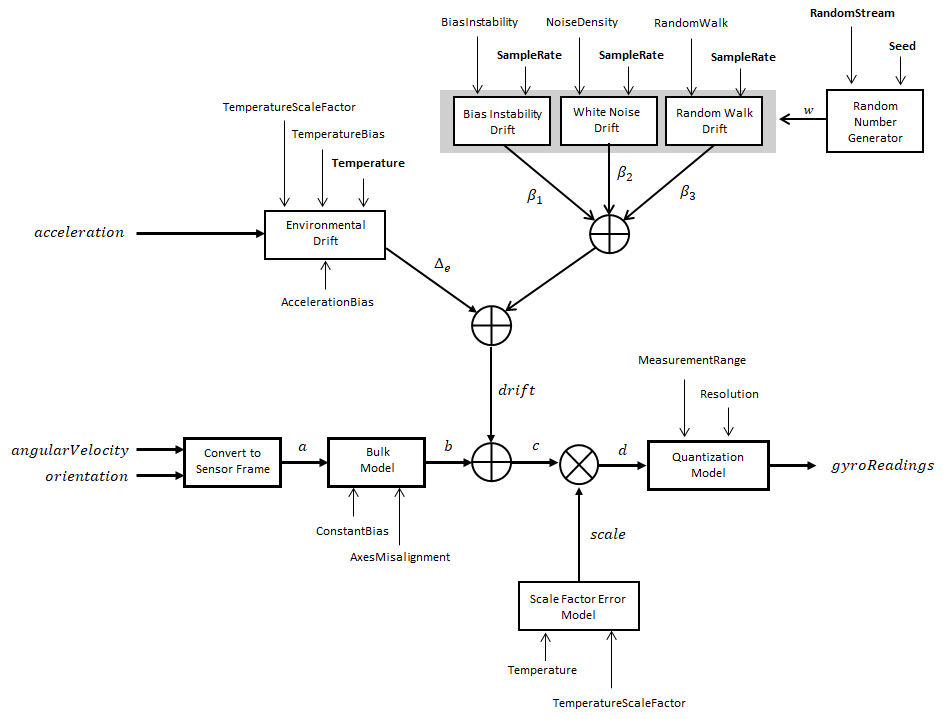
Угловая скорость «земля-истина» преобразуется из локального кадра в кадр датчика с использованием ориентации «земля-истина»:
angularVelocity) T
Если ориентация вводится в форме кватерниона, она преобразуется в матрицу вращения перед обработкой.
Угловая скорость «земля-истина» в кадре датчика, а, проходит через объемную модель, что добавляет несовпадение осей и смещение:
ConstantBias
где ConstantBias является свойством gyroparams, а α1, α2 и α3 даны первым, вторым и третьим элементами свойства Misalignment gyroparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
Нестабильность)
где BiasНеустойчивость является свойством gyroparams h1 - фильтр, определенный свойством SampleRate:
12z − 1
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
Плотность)
где SampleRate является imuSensor свойство, и NoaseDensity является gyroparams собственность. Элементы w являются случайными числами, заданными настройками imuSensor случайный поток.
Дрейф случайного хождения моделируется смещающими элементами случайного потока белого шума и затем фильтруется:
RandomWalkSampleRate2)
где RandomWalk является свойством gyroparams, SampleRate является свойством imuSensor, и h2 является фильтром, определяемым как:
− z − 1
Шум дрейфа окружающей среды моделируется путем умножения разности температур из стандарта с температурным смещением:
Температура Смещение)
где Температура является свойством imuSensor, и TemperateBias является свойством gyroparams. Постоянная 25 соответствует стандартной температуре.
Погрешность температурного коэффициента моделируется следующим образом:
температурный коэффициент)
где Температура является свойством imuSensor, а TemperateScityFactor является свойством gyroparams. Постоянная 25 соответствует стандартной температуре.
Квантование моделируется посредством первого насыщения модели непрерывного сигнала:
а затем установите разрешение:
eResolution))
где MeasureRange является свойством gyroparams.
Модель магнитометра использует входы ориентации и ускорения «земля-истина», а также imuSensor и magparams свойства для моделирования показаний магнитометра.
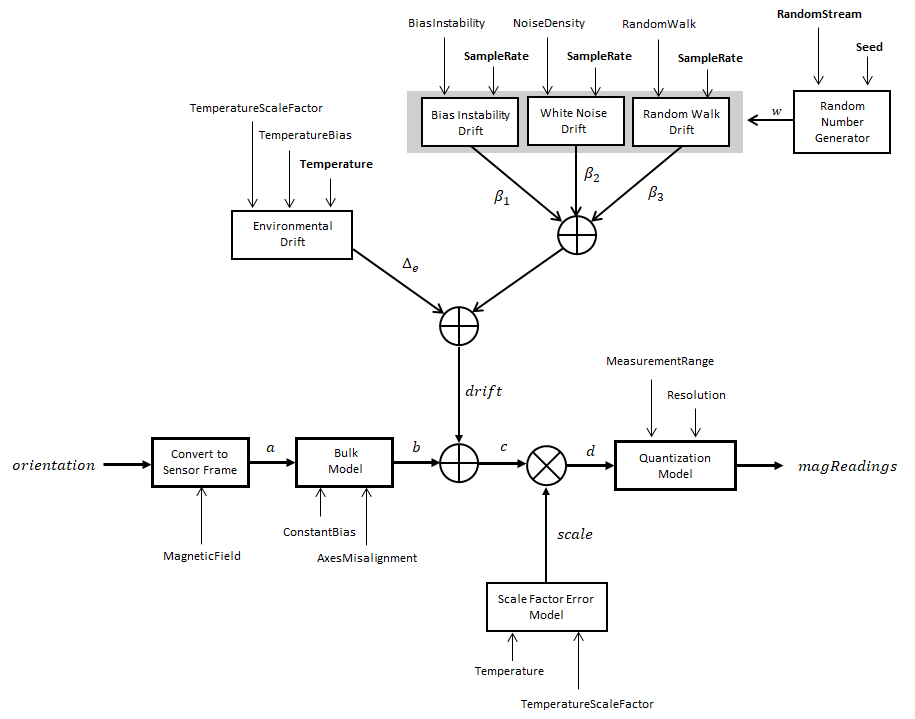
Ускорение «земля-истина» преобразуется из локального кадра в кадр датчика с использованием ориентации «земля-истина»:
totalAcc) T
Если ориентация вводится в форме кватерниона, она преобразуется в матрицу вращения перед обработкой.
Ускорение «земля-истина» в кадре датчика, а, проходит через объемную модель, что добавляет несовпадение осей и смещение:
ConstantBias
где ConstantBias является свойством magparams, а α1, α2 и α3 даны первым, вторым и третьим элементами свойства Misalignment magparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
Нестабильность)
где BiasНеустойчивость является свойством magparams h1 - фильтр, определенный свойством SampleRate:
12z − 1
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
Плотность)
где SampleRate является imuSensor свойство, и NoaseDensity является magparams собственность. Элементы w являются случайными числами, заданными настройками imuSensor случайный поток.
Дрейф случайного хождения моделируется смещающими элементами случайного потока белого шума и затем фильтруется:
RandomWalkSampleRate2)
где RandomWalk является свойством magparams, SampleRate является свойством imuSensor, и h2 является фильтром, определяемым как:
− z − 1
Шум дрейфа окружающей среды моделируется путем умножения разности температур из стандарта с температурным смещением:
Температура Смещение)
где Температура является свойством imuSensor, и TemperateBias является свойством magparams. Постоянная 25 соответствует стандартной температуре.
Погрешность температурного коэффициента моделируется следующим образом:
температурный коэффициент)
где Температура является свойством imuSensor, а TemperateScityFactor является свойством magparams. Постоянная 25 соответствует стандартной температуре.
Квантование моделируется посредством первого насыщения модели непрерывного сигнала:
а затем установите разрешение:
eResolution))
где MeasureRange является свойством magparams.

