В этом разделе приводится информация об аналогово-цифровом контроллере (АЦП) и калибровке смещения датчика положения.
В инверторе кондиционирование сигнала для датчика тока вводит напряжение смещения на вход АЦП для измерения как положительного, так и отрицательного тока. Это значение смещения различно для каждого целевого аппаратного обеспечения, поскольку оно зависит от допусков компонентов в схеме считывания и кондиционирования сигнала. Рекомендуется измерить текущее смещение ADC датчика для целевого оборудования. Смещение АЦП датчика тока представлено счетчиками АЦП, соответствующими току нулевого ампера.
Посмотрите Пробег в качестве примера 3-фазовые электродвигатели переменного тока в Контроле разомкнутого контура и Калибруйте Смещение ADC, чтобы вручную измерить стоимость смещения ADC. В примерах Blockset™ управления двигателем обновите измеренное значение в inverter.CtSensAOffset и inverter.CtSensBOffset переменные в сценарии инициализации модели. По умолчанию сценарий обновляет inverter.CtSensAOffset и inverter.CtSensBOffset переменные со значениями по умолчанию.
Примеры в блоке управления двигателем вычисляют текущее смещение ADC датчика в подсистеме инициализации оборудования. В сценарии инициализации модели при установке inverter.ADCOffsetCalibEnable = 1, сценарий включает текущую калибровку смещения датчика в целевом оборудовании во время инициализации. В подсистеме аппаратной инициализации каналы АЦП считывают входной ток многократно и усредняют его. Текущий контроллер использует это усредненное значение смещения АЦП. В сценарии инициализации модели при установке inverter.ADCOffsetCalibEnable = 0, сценарий отключает текущую калибровку смещения датчика и использует значения из сценария инициализации.
Примечание
Всегда измеряйте смещение ADC датчика тока, когда двигатель не работает. Рекомендуется отключить электрические провода, подключенные к двигателю.
Контроллер требует вычисления смещения датчика положения, чтобы определить точную обратную связь в реальном времени положения ротора и правильно реализовать алгоритм полевого управления (ВОК). Рекомендуется использовать примеры для калибровки смещения для вычисления смещения положения перед выполнением любого другого примера с использованием ВОК.
Смещение датчика Холла - это угол между осью d ротора и положением, определяемым датчиком Холла. Смещение можно использовать для коррекции и вычисления точного положения d-оси ротора.
Смещение датчика квадратурного кодера - это угол между d-осью ротора и положением импульса индекса кодера, обнаруженный квадратурным кодером.
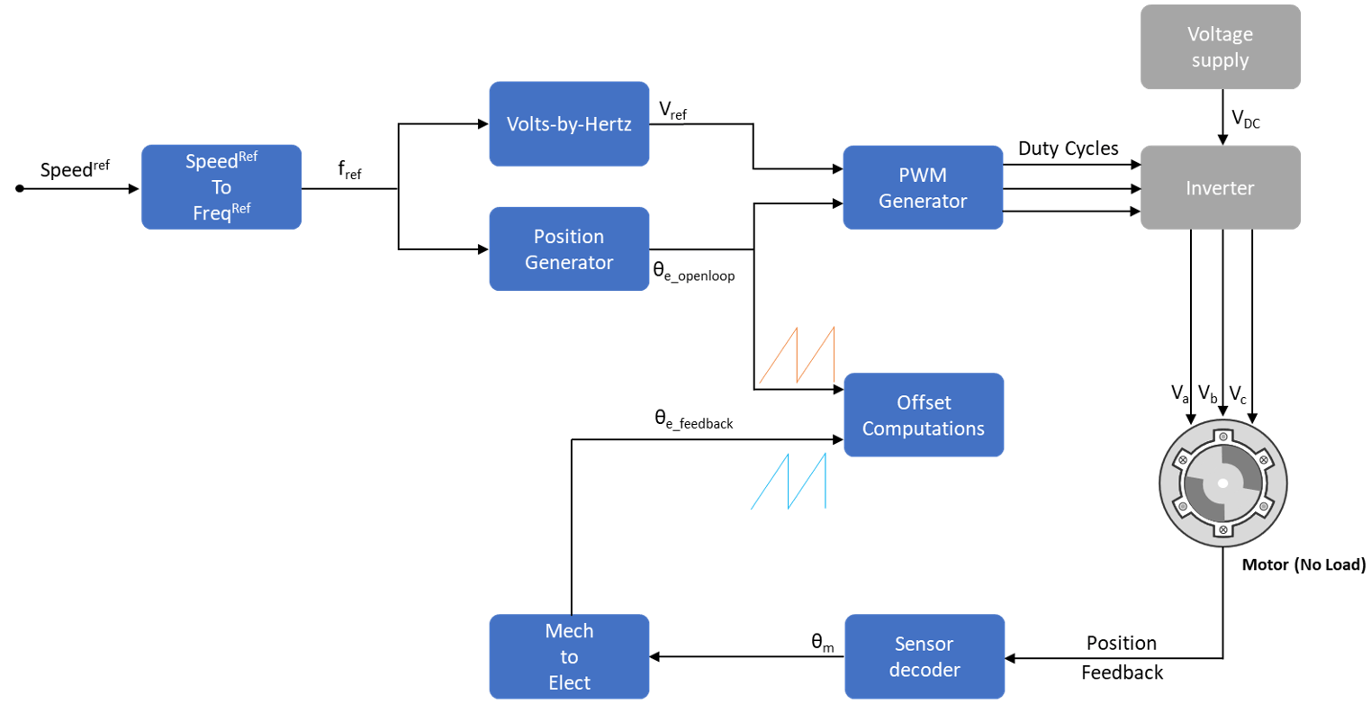
Блок управления двигателем предлагает примеры, такие как калибровка смещения квадратурного кодера для двигателя PMSM и калибровка смещения Холла для двигателя PMSM, чтобы получить точное положение ротора для реализации алгоритма управления. Примеры вычисления смещения используют уникальный алгоритм наряду с управлением с разомкнутым контуром для вычисления смещений положения датчиков положения (квадратурный кодер Холла). Управление с разомкнутым контуром (также известное как скалярное управление или управление вольт/Гц) - популярный метод управления двигателем, который можно использовать для запуска любого двигателя переменного тока. Это простая техника, которая не нуждается в какой-либо обратной связи от двигателя. Чтобы обеспечить постоянный магнитный поток статора, поддерживайте амплитуду напряжения питания пропорциональной его частоте. На этом рисунке показан обзор управления с разомкнутым контуром. Дополнительные сведения см. в разделах Управление по разомкнутому и замкнутому контурам.
Используя этот алгоритм, примеры калибровки смещения обнаруживают смещение положения следующим образом:
Проверьте, находится ли двигатель в режиме холостого хода.
Запустите и запустите двигатель с разомкнутым контуром на очень низкой скорости (например, 60 об/мин). При низкой скорости ось d ротора близко выравнивается с вращающимся магнитным полем статора.
Измерьте позицию обратной связи имеющегося датчика положения (квадратурный кодер Холла).
Сравните положение разомкнутого контура с положением обратной связи и проверьте правильность фазовой последовательности. При необходимости скорректируйте фазовую последовательность двигателя.
Вычислите смещение положения датчика Холла, получив разность между положением разомкнутого контура и положением обратной связи.
Запустите двигатель в разомкнутом контуре в течение нескольких циклов и остановите двигатель. Убедитесь, что импульс индекса кодера обнаружен хотя бы один раз. Зафиксируйте ротор по оси D. Смещение положения квадратурного кодера идентично обратной связи положения. Это выводит положение механического смещения квадратурного кодера.
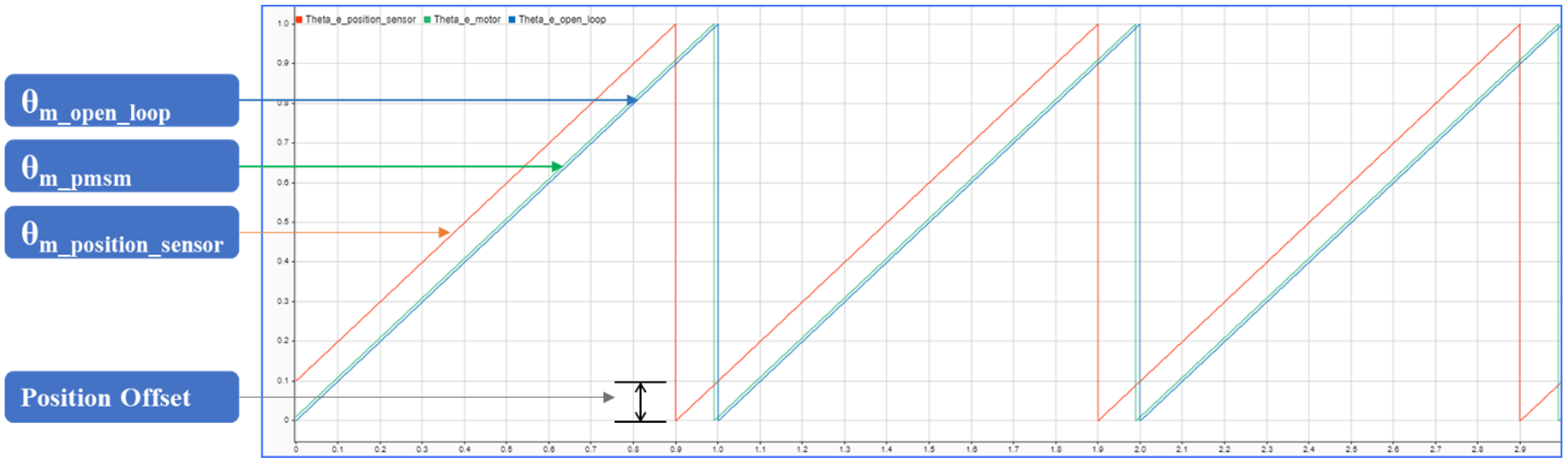
На этом рисунке показано сравнение положения разомкнутого контура из алгоритма управления с фактическим положением двигателя. На рисунке также показана обратная связь от датчика положения. Смещение положения, которое представляет собой разность между положением разомкнутого контура и положением обратной связи от датчика, вычисляется по алгоритму, предусмотренному в моделях калибровки смещения.
Обновить измеренное смещение в pmsm.PositionOffset переменная в сценарии инициализации модели примеров.
Для оценки параметров обновите измеренное смещение Холла в поле Смещение Холла mcb_param_est_host_read модель.
Примечание
Пример калибровки смещения Холла для двигателя PMSM выводит смещение электрического положения. В то время как пример калибровки смещения квадратурного кодера для двигателя PMSM выводит механическое смещение положения.
Шаги по вычислению смещений см. в следующих примерах.
Калибровка смещения квадратурного кодера для двигателя PMSM
