Вычислять коэффициент усиления постоянного тока с замкнутым контуром от выходных возмущений к измеренным выходам, предполагая, что ограничения неактивны в установившемся состоянии
Эта функция используется для вычисления выходной чувствительности замкнутого контура в установившемся состоянии. Нулевое значение означает, что измеренный выходной сигнал установки может отслеживать требуемую контрольную уставку выходного сигнала.
dcgain = cloffset(MPCobj)dcgain. mpcobj - объект MPC, определяющий контроллер, для которого вычисляется коэффициент усиления по замкнутому контуру.
Вычисление влияния выходных возмущений
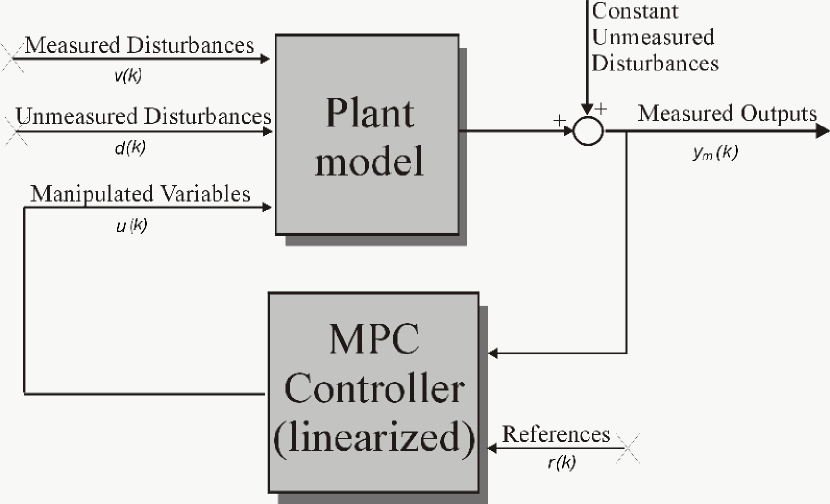
На основе принципа наложения эффектов коэффициент усиления вычисляется путем обнуления опорных элементов, измеренных возмущений и неизмеренных входных возмущений.
