Преобразование диаграммы направленности из формы u/v в форму азимута/отметки
pat_azel = uv2azelpat(pat_uv,u,v)pat_azel в координатах азимута/угла места вместо координат пространства u/v. pat_uv отбирает узор под углами u в u и v углов в v. pat_azel матрица использует сетку по умолчанию, которая охватывает значения азимута от -90 до 90 градусов и значения отметки от -90 до 90 градусов. В этой сетке, pat_azel производят равномерную выборку с размером шага 1 для азимута и отметки. Функция интерполирует для оценки отклика антенны в заданном направлении.
Преобразование диаграммы направленности в форму азимута/отметки с углами, отстоящими друг от друга на 1 °.
Определите шаблон в терминах u и v. Поскольку значения u и v вне единичной окружности не являются физическими, установите значения шаблона в этой области равными нулю.
u = -1:0.01:1; v = -1:0.01:1; [u_grid,v_grid] = meshgrid(u,v); pat_uv = sqrt(1 - u_grid.^2 - v_grid.^2); pat_uv(hypot(u_grid,v_grid) >= 1) = 0;
Преобразуйте образец в пространство азимута/фасада.
pat_azel = uv2azelpat(pat_uv,u,v);
Преобразование диаграммы направленности в форму азимута/отметки с углами, отстоящими друг от друга на 1 °.
Определите шаблон в терминах u и v. Поскольку значения u и v вне единичной окружности не являются физическими, установите значения шаблона в этой области равными нулю.
u = -1:0.01:1; v = -1:0.01:1; [u_grid,v_grid] = meshgrid(u,v); pat_uv = sqrt(1 - u_grid.^2 - v_grid.^2); pat_uv(hypot(u_grid,v_grid) >= 1) = 0;
Преобразуйте образец в пространство азимута/фасада. Запишите азимут и углы места для построения графика.
[pat_azel,az,el] = uv2azelpat(pat_uv,u,v);
Постройте график.
H = surf(az,el,pat_azel); H.LineStyle = 'none'; xlabel('Azimuth (degrees)') ylabel('Elevation (degrees)') zlabel('Pattern')

Преобразование диаграммы направленности в форму азимута/отметки с разнесением углов на 5 °.
Определите шаблон в терминах u и v. Поскольку значения u и v вне единичной окружности не являются физическими, установите значения шаблона в этой области равными нулю.
u = -1:0.01:1; v = -1:0.01:1; [u_grid,v_grid] = meshgrid(u,v); pat_uv = sqrt(1 - u_grid.^2 - v_grid.^2); pat_uv(hypot(u_grid,v_grid) >= 1) = 0;
Определите набор углов азимута и отметки, при которых будет производиться выборка образца. Затем преобразуйте шаблон.
az = -90:5:90; el = -90:5:90; pat_azel = uv2azelpat(pat_uv,u,v,az,el);
Постройте график.
H = surf(az,el,pat_azel); H.LineStyle = 'none'; xlabel('Azimuth (degrees)') ylabel('Elevation (degrees)') zlabel('Pattern')

Угол фи - это угол от положительной оси y до ортогональной проекции вектора на плоскость yz. Угол положителен к положительной оси Z. Угол фи находится в диапазоне от 0 до 360 градусов. Theta angle (start) - это угол от оси X до самого вектора. Угол положителен к плоскости yz. Угол тета находится в диапазоне от 0 до 180 градусов.
Рисунок иллюстрирует фи и тета для вектора, который выглядит как зеленая сплошная линия.
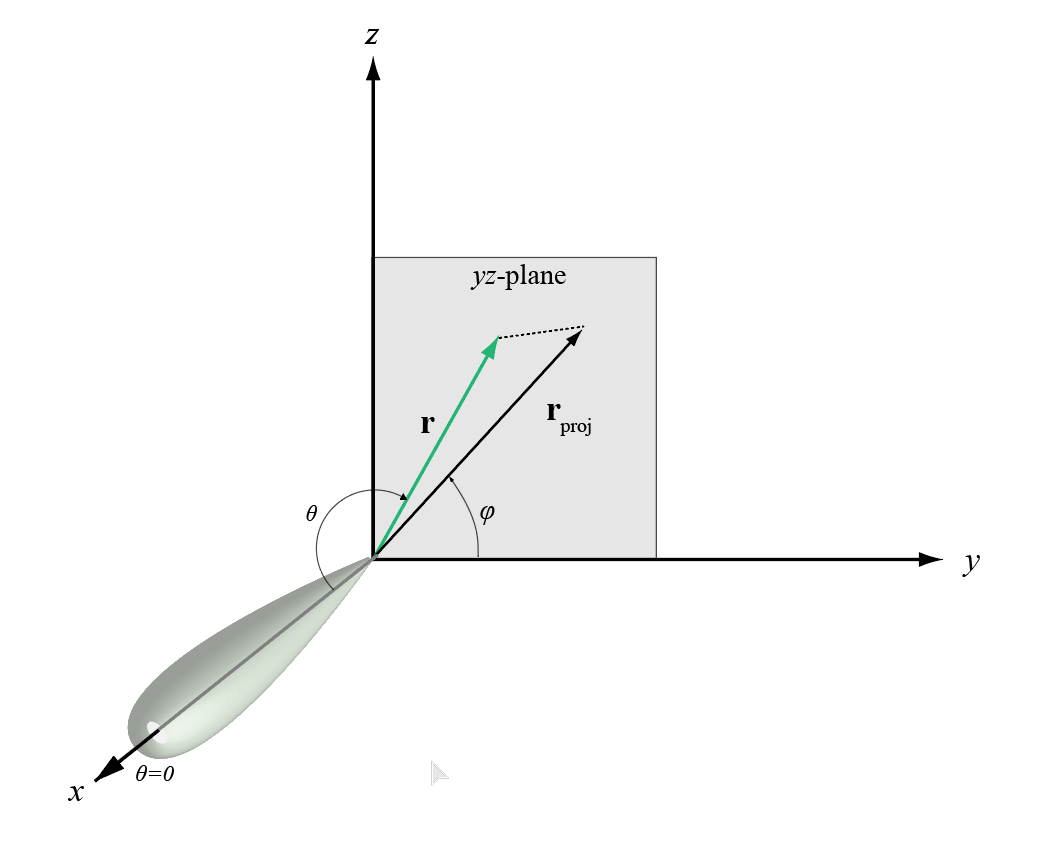
Координатные преобразования между start/startи az/el описываются следующими уравнениями
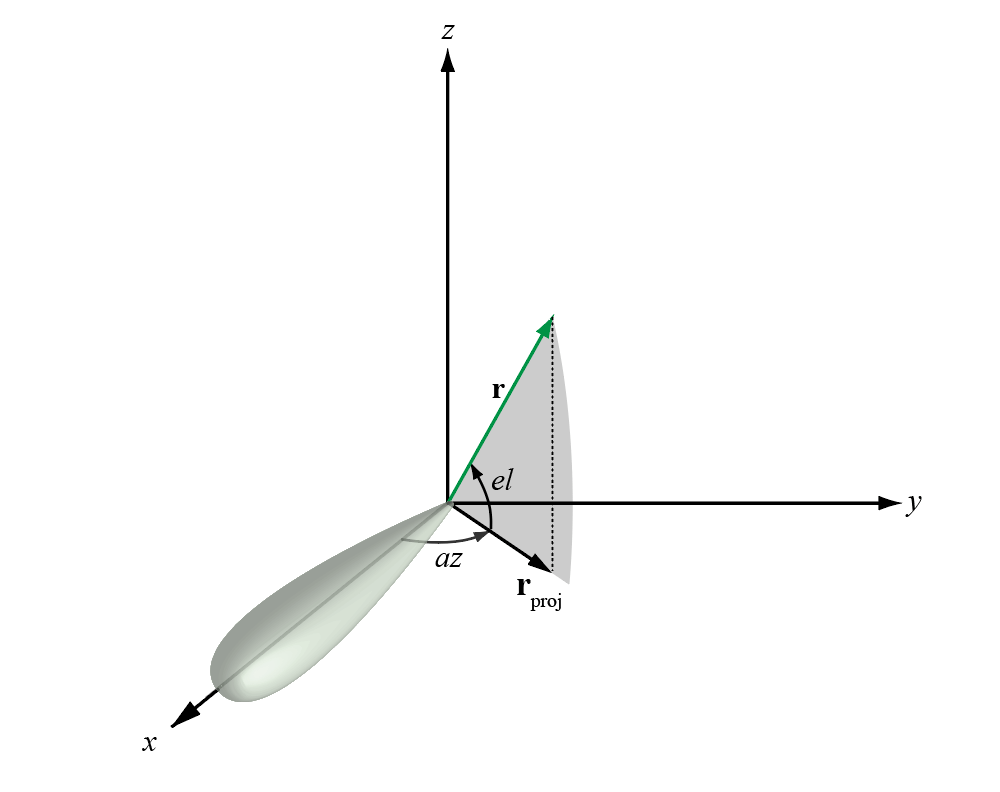
Азимутальный угол вектора - это угол между осью x и ортогональной проекцией вектора на плоскость xy. Угол положителен в направлении от оси x к оси y. Азимутальные углы лежат между -180 и 180 градусами. Угол места - это угол между вектором и его ортогональной проекцией на плоскость xy. При переходе к положительной оси Z от плоскости xy угол является положительным. По умолчанию направление визирования элемента или массива выравнивается по положительной оси X. Направление визирования - это направление главного лепестка элемента или массива.
Примечание
Иногда угол возвышения определяется в литературе как угол вектора с положительной осью z. В продуктах MATLAB ® и Phased Array System Toolbox™ это определение не используется.
Этот рисунок иллюстрирует азимутальный угол и угол возвышения для вектора, показанного зеленой сплошной линией.