Гидравлический привод, воздействующий в обоих направлениях
Гидроцилиндры
Блок «Гидроцилиндр двойного действия» моделирует устройство, преобразующее гидравлическую энергию в механическую в виде поступательного движения. Гидравлическая жидкость, закачиваемая под давлением в одну из двух камер цилиндра, заставляет поршень двигаться и прикладывать усилие к штоку цилиндра. Цилиндры двойного действия передают силу и движение в обоих направлениях.
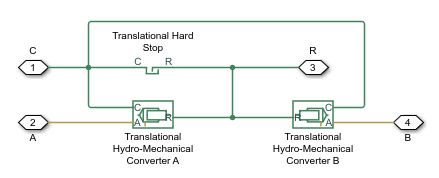
Соединения R и C являются механическими поступательными консервационными отверстиями, соответствующими штоку цилиндра и зажимной конструкции цилиндра соответственно. Соединения A и B являются гидравлическими консервационными портами. Порт A подключен к преобразователю A, а порт B - к преобразователю B.
Энергия через гидравлический порт A или B направляется в соответствующий блок поступательного гидромеханического преобразователя. Преобразователь преобразует гидравлическую энергию в механическую и учитывает сжимаемость жидкости в камере цилиндра. Движение штока ограничено механическим блоком поступательного жесткого останова таким образом, что шток может перемещаться только между крышками цилиндров.
Смещение поршня измеряется как положение в отверстии R относительно отверстия C. Ориентация цилиндра определяет направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем камеры А равен мертвому объему камеры. При приеме смещения в качестве входа убедитесь, что производная положения равна скорости поршня. Это происходит автоматически, когда входные данные поступают от соединения блока поступательного многофакторного интерфейса к соединению Simscape Multibody.
Модель цилиндра построена из блоков библиотеки Simscape™ Foundation. Принципиальная схема модели показана ниже.
Утечка, внутренняя или внешняя, не учитывается.
Никакие нагрузки на шток поршня, такие как инерция, трение, пружина и так далее, не учитываются. При необходимости их можно легко добавить, подключив соответствующий стандартный блок к отверстию цилиндра R.
Камера А - эффективная площадь поршня. Значение по умолчанию: 1e-3 м ^ 2.
Камера В - эффективная площадь поршня. Значение по умолчанию: 0.5e-3 м ^ 2.
Максимальный ход поршня между колпачками. Значение по умолчанию: 0.1 м.
Объем жидкости в камере А, остающийся в камере после полного отвода штока. Значение по умолчанию: 1e-4 м ^ 3.
Объем жидкости в камере В, остающийся в камере после полного выдвижения штока. Значение по умолчанию: 1e-4 м ^ 3.
Газоспецифическое тепловое отношение для блоков гидравлической поршневой камеры. Значение по умолчанию: 1.4.
Указывает ориентацию цилиндра по отношению к глобально назначенному положительному направлению. Цилиндр может быть установлен двумя различными способами, в зависимости от того, оказывает ли он силу в положительном или отрицательном направлении при приложении давления на его входе. Если давление, приложенное к порту A, оказывает силу в отрицательном направлении, установите для параметра значение Pressure at A causes negative displacement of R relative to C. Значение по умолчанию: Pressure at A causes positive displacement of R relative to C.
Задает свойство упругости сталкивающихся тел для блока поступательного жесткого останова. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем жестче становится удар. Меньшее значение параметра делает контакт мягче, но в целом улучшает сходимость и вычислительную эффективность. Значение по умолчанию: 1e6 Н/м.
Определяет свойство рассеивания сталкивающихся тел для блока поступательного жесткого останова. При нулевом демпфировании удар близок к абсолютно упругому. Чем больше значение параметра, тем больше энергия рассеивается во время взаимодействия. Помните, что демпфирование влияет на движение ползуна до тех пор, пока ползун находится в контакте с упором, включая период, когда ползун оттягивается от контакта. В целях эффективности вычислений и сходимости MathWorks рекомендует назначить этому параметру ненулевое значение. Значение по умолчанию - 150 Н * с/м.
Моделирование подхода для жестких остановок. Варианты включают в себя:
Stiffness and damping applied smoothly through transition region (по умолчанию) - масштабирование величины контактной силы от нуля до ее полного значения по заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования многочлена является численно гладкой и не производит нулевых пересечений любого рода.
Full stiffness and damping applied at bounds, undamped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время проникновения и пружинной силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это модель hard-stop, использовавшаяся в предыдущих выпусках.
Расстояние, ниже которого масштабирование применяется к силе жесткого упора. Контактное усилие равно нулю, если расстояние до жесткого упора равно указанному здесь значению. Оно имеет полное значение, когда расстояние до жесткой остановки равно нулю. Значение по умолчанию - 0,1 mm.
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОРШНЯ. Блок может получить позицию из блока Multibody, если установлен в Provide input signal from Multibody joint, который предоставляет физический сигнальный порт p. Значение по умолчанию: Calculate from velocity of port R relative to port C.
Расстояние, на которое поршень удлиняется в начале моделирования. Можно установить положение поршня в любую точку в пределах его хода. Значение по умолчанию: 0, что соответствует полностью убранному положению. Чтобы включить этот параметр, установите для параметра Перемещение поршня от колпачка A значение Calculate from velocity of port R relative to port C.
Давление в полости цилиндра А в начале моделирования. Значение по умолчанию: 0.
Давление в полости цилиндра Б в начале моделирования. Значение по умолчанию: 0.
Параметр, определяемый типом рабочей жидкости:
Модуль объема жидкости
Для задания свойств жидкости используйте блок «Гидравлическая жидкость» или блок «Пользовательская гидравлическая жидкость».
Блок имеет следующие порты:
AОтверстие гидравлической экономии, связанное с камерой А цилиндра.
BПорт гидравлической экономии, связанный с камерой B цилиндра.
RМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ СО ШТОКОМ ЦИЛИНДРА.
CМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ С ЦИЛИНДРИЧЕСКОЙ ЗАЖИМНОЙ КОНСТРУКЦИЕЙ.
pПоложение поршня, принимаемое как физический сигнал от блока Simscape Multibody™. Чтобы открыть этот порт, установите для параметра Перемещение поршня от колпачка A значение Provide input signal from Multibody joint.
Пример гидравлического цилиндра с гибким креплением иллюстрирует моделирование цилиндра, зажим которого является слишком гибким, чтобы им нельзя было пренебречь. Конструкция выполнена в виде пружины и демпфера, установленных между корпусом цилиндра и опорной точкой. Цилиндр выполняет ход вперед и назад и нагружается инерцией, вязким трением и постоянной противоположной нагрузкой 400 Н.
Пример пользовательского гидравлического цилиндра демонстрирует использование четырехходового клапана в сочетании с цилиндром двойного действия в простом приводе с замкнутым контуром. В примере показано, как соединить блоки и задать начальные отверстия для четырехходового клапана для моделирования хода вперед и назад цилиндра под нагрузкой.
Идеальный датчик поступательного движения | Гидроцилиндр одностороннего действия | Жесткая остановка трансляций | Трансляционный гидромеханический преобразователь
