Гидропривод, воздействующий в одном направлении
Гидроцилиндры
Блок однонаправленного гидроцилиндра моделирует устройство, преобразующее гидравлическую энергию в механическую в виде поступательного движения. Гидравлическая жидкость, закачиваемая под давлением в полость цилиндра, заставляет поршень двигаться и прикладывать усилие к штоку цилиндра. Цилиндры одностороннего действия передают силу и движение только в одном направлении. Для перемещения штока в противоположном направлении используйте внешнее устройство, например пружину, груз или другой противоположный установленный цилиндр.
Отверстия R и C являются механическими поступательными консервационными отверстиями, соответствующими штоку цилиндра и зажимной конструкции цилиндра соответственно. Порт А является гидравлическим консервационным отверстием, связанным с впускным отверстием цилиндра.
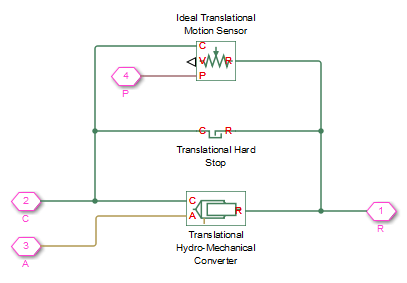
Энергия через порт А направляется в блок поступательного гидромеханического преобразователя. Преобразователь преобразует гидравлическую энергию в механическую и учитывает сжимаемость жидкости в камере цилиндра. Движение штока ограничено механическим блоком поступательного жесткого останова таким образом, что шток может перемещаться только между крышками цилиндров. Положение поршня передается в порт р физического сигнала.
Смещение поршня измеряется как положение в отверстии R относительно отверстия C. Ориентация цилиндра определяет направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем камеры равен мертвому объему камеры. При приеме смещения в качестве входа убедитесь, что производная положения равна скорости поршня. Это происходит автоматически, когда входные данные поступают от соединения блока поступательного многофакторного интерфейса к соединению Simscape Multibody.
Когда смещение задается цилиндром, оно рассчитывается как:
| xpst = x0 + xp | (1) |
где
| xpst | Смещение стержня, выводимое портом физического сигнала |
| x0 | Начальное расстояние между поршнем и колпачком |
| xp | Перемещение штока относительно его исходного положения |
Модель цилиндра построена из блоков библиотеки Simscape™ Foundation. Принципиальная схема модели показана ниже.
Утечка, внутренняя или внешняя, не учитывается.
Никакие нагрузки на шток поршня, такие как инерция, трение, пружина и так далее, не учитываются. При необходимости их можно легко добавить, подключив соответствующий стандартный блок к отверстию цилиндра R.
Эффективная площадь поршня. Значение по умолчанию: 0.001 м ^ 2.
Максимальный ход поршня между колпачками. Значение по умолчанию: 0.1 м.
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОРШНЯ. Значение по умолчанию: Calculate from velocity of port R relative to port C, которая вычисляет позицию внутри и сообщает позицию в порту Р. Блок также может получить позицию в порту p из блока Multibody, когда установлен в Provide input signal from Multibody joint.
Расстояние между поршнем и колпачком в начале моделирования. Это значение не может превышать ход поршня. Значение по умолчанию: 0, что соответствует полностью убранному положению. Чтобы включить этот параметр, задайте для параметра Перемещение поршня значение Calculate from velocity of port R relative to port C.
Объем жидкости, остающийся в камере после полного отвода штока. Значение по умолчанию: 1e-4 м ^ 3.
Давление в полости цилиндра в начале моделирования. Значение по умолчанию: 0.
Газоспецифическое тепловое отношение для блока гидравлической поршневой камеры. Значение по умолчанию: 1.4.
Задает свойство упругости сталкивающихся тел для блока поступательного жесткого останова. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем жестче становится удар. Меньшее значение параметра делает контакт мягче, но в целом улучшает сходимость и вычислительную эффективность. Значение по умолчанию: 1e6 Н/м.
Определяет свойство рассеивания сталкивающихся тел для блока поступательного жесткого останова. При нулевом демпфировании удар близок к абсолютно упругому. Чем больше значение параметра, тем больше энергия рассеивается во время взаимодействия. Помните, что демпфирование влияет на движение ползуна до тех пор, пока ползун находится в контакте с упором, включая период, когда ползун оттягивается от контакта. В целях эффективности вычислений и сходимости MathWorks рекомендует назначить этому параметру ненулевое значение. Значение по умолчанию - 150 Н * с/м.
Моделирование подхода для жестких остановок. Варианты включают в себя:
Stiffness and damping applied smoothly through transition region (по умолчанию) - масштабирование величины контактной силы от нуля до ее полного значения по заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования многочлена является численно гладкой и не производит нулевых пересечений любого рода.
Full stiffness and damping applied at bounds, undamped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время проникновения и пружинной силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Применить полное значение расчетного контактного усилия при нарушении положения жесткого упора. Контактная сила представляет собой смесь пружинных и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это модель hard-stop, использовавшаяся в предыдущих выпусках.
Расстояние, ниже которого масштабирование применяется к силе жесткого упора. Контактное усилие равно нулю, если расстояние до жесткого упора равно указанному здесь значению. Оно имеет полное значение, когда расстояние до жесткой остановки равно нулю. Значение по умолчанию - 1 mm..
Указывает ориентацию цилиндра по отношению к глобально назначенному положительному направлению. Цилиндр может быть установлен двумя различными способами, в зависимости от того, оказывает ли он силу в положительном или отрицательном направлении при приложении давления на его входе. Если давление, приложенное к порту A, оказывает силу в отрицательном направлении, установите для параметра значение Pressure at A causes negative displacement of R relative to C. Значение по умолчанию: Pressure at A causes positive displacement of R relative to C.
Параметр, определяемый типом рабочей жидкости:
Модуль объема жидкости
Для задания свойств жидкости используйте блок «Гидравлическая жидкость» или блок «Пользовательская гидравлическая жидкость».
Блок имеет следующие порты:
AПорт гидравлической экономии, связанный с входом цилиндра.
RМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ СО ШТОКОМ ЦИЛИНДРА.
CМЕХАНИЧЕСКОЕ ПОСТУПАТЕЛЬНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ С ЦИЛИНДРИЧЕСКОЙ ЗАЖИМНОЙ КОНСТРУКЦИЕЙ.
pПорт ввода физического сигнала, принимающий удлинение стержня от блока Multibody. Чтобы открыть этот порт, установите для параметра Перемещение поршня значение Provide input signal from Multibody joint.
pПорт вывода физического сигнала, возвращающий положение штока относительно порта C. Чтобы открыть этот порт, установите для параметра Перемещение поршня значение Calculate from velocity of port R relative to port C.
Гидроцилиндр двойного действия | Идеальный датчик поступательного движения | Гидроцилиндр одностороннего действия (простой) | Жесткая остановка трансляций | Трансляционный гидромеханический преобразователь
