Система электропередачи с цепью и двумя звездочками
Simscape/Привод/Муфты и приводы

Блок цепного привода представляет собой систему электропередачи с цепью и двумя звездочками. Цепь входит в зацепление со звездочками, передавая вращательное движение между ними. Передача мощности может происходить в обратном направлении, то есть от ведомой к ведущей звездочке, из-за внешних нагрузок. Это состояние известно как движение назад.
Цепочка привода совместима. Он может растянуться под напряжением или ослабнуть, если ослабнет. Модель податливости состоит из линейного пружинно-демпферного комплекта в параллельном расположении. Пружина сопротивляется растягивающей деформации в цепи. Демпфер сопротивляется растягивающему движению между цепными элементами.
Силы пружины и демпфера действуют непосредственно на звездочки, которые соединяет цепь. Сила пружины присутствует, когда одна ветвь цепи натянута. Демпферная сила присутствует непрерывно. Чтобы представить условие отказа и сообщить о нем, моделирование останавливается и генерирует ошибку, если результирующая растягивающая сила в цепи превышает заданное максимальное значение натяжения.
Блок имеет вязкое трение на подшипниках шарнира звездочки. Во время движения вязкое трение вызывает потери в передаче энергии, снижая эффективность цепного привода. Эти потери связаны с затуханием цепи. Чтобы исключить потери в передаче энергии в цепном приводе, в настройках Dynamic установите нулевые параметры вязкого трения и затухания цепи.
Скорость растяжения в цепи является разницей между тангенциальными скоростями звездочки, каждая из которых является произведением угловой скорости и радиусов шага. Математически,
где:
x - деформация растяжения.
ωA, ωB - цепное колесо угловые скорости.
RA, RB - радиусы шага звездочки.
На рисунке показаны соответствующие переменные.
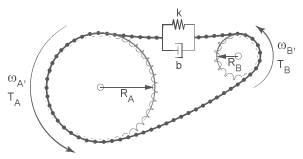
Сила растяжения цепи представляет собой общую сумму сил пружины и демпфера. Сила пружины является результатом растяжения и постоянной жесткости пружины. Эта сила равна нулю, когда деформация растяжения меньше, чем провисание цепи. Сила демпфера является произведением скорости растяжения и коэффициента демпфирования. Математически,
k−x˙b,x<−S2,
где:
S - провал цепи.
k - постоянная жесткость пружины.
b - коэффициент демпфера.
Цепь оказывает крутящий момент на каждую звездочку, равный произведению силы растяжения и радиуса шага звездочки. Два момента действуют в противоположных направлениях в соответствии с этими уравнениями:
· RA
· RB
Где:
A - крутящий момент, который цепочка прикладывает к звездочке A.
В - это крутящий момент, который цепочка прикладывает к звездочке В.
С точки зрения скорости и учета трения применяются следующие уравнения:
· RB
RB
Где:
λ А - скорость вращения звездочки А.
startB - скорость вращения звездочки B.
мкА - коэффициент вязкого трения для звездочки А.
мкВ - коэффициент вязкого трения для звездочки В.
Вкладка «Переменные» используется для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
В отличие от параметров блока, переменные не имеют условной видимости. На вкладке «Переменные» перечислены все существующие переменные блока. Если переменная не используется в наборе уравнений, соответствующих выбранной конфигурации блока, значения, указанные для этой переменной, игнорируются.
Отношение зубьев звездочки равно отношению радиуса шага звездочки.
Инерция цепи ничтожна.

