Механизм демпфирования поступательных колебаний
Simscape/Привод/Муфты и приводы

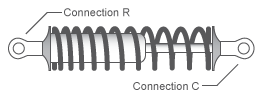
Блок амортизатора представляет собой пружинно-демпферную систему, обычно используемую для демпфирования вибрации в механических системах. Внутренняя сила действует между портами R и C. Эта сила представляет собой сумму жесткости пружины, демпфирования, трения Кулона и вклада жесткого упора. Все взносы сил являются необязательными.
Блок амортизатора использует модели этих блоков:
| Блок | Вклад | Библиотека |
|---|---|---|
| Нагруженное (Loaded) - контактное поступательное трение | Кулонское трение | Simscape/Привод/Тормоза и стопоры/Поступательные |
| Поворотный демпфер | Демпфирование | Simscape / Библиотека Фонда / Механический / Переводные Элементы |
| Вращающаяся пружина | Весна | |
| Жесткая остановка вращения | Жесткая остановка |
Включение жесткого упора и кулоновского трения повышает точность модели, но снижает скорость моделирования. Дополнительные сведения см. в разделе Производительность моделирования трансмиссии.
Механический поступательный порт, связанный с ползунком, который перемещается между упорами, установленными на корпусе.
Механический поступательный порт, связанный со стержнем.
Введите значение постоянной жесткости вязкой пружины, k. Значение по умолчанию: 1e4
N/m. Значение должно быть больше или равно нулю.
Введите значение вязкой постоянной демпфирования, b. Значение по умолчанию: 1e2
m/s. Значение должно быть больше или равно нулю.
Введите значение силы трения Кулона. Установка значения 0 устраняет влияние силы трения Кулона. Это повышает скорость моделирования, делая модель более подходящей для испытаний HIL. Значение по умолчанию: 0
N. Значение должно быть больше или равно нулю.
Введите значение отношения статического/кинетического трения, то есть Fs/Fk. Значение должно быть больше единицы. Значение по умолчанию: 1.1. Значение должно быть больше или равно единице.
Введите значение относительной скорости, ниже которой порты R и C блокируются и перемещаются вместе. Значение по умолчанию: 0.001
m/s. Значение должно быть больше нуля.
Включите или исключите силу жесткого останова, выбрав одну из следующих опций.
No hard stops — Suitable for HIL simulation - Чтобы увеличить скорость моделирования, исключив силу жесткого останова, выберите этот параметр по умолчанию.
Compliant hard stops - Чтобы повысить точность модели, включив в нее силу жесткой остановки, выберите эту опцию. При выборе этой опции включаются другие параметры.
Верхнее положение жесткого упора, UB. Положительное перемещение за пределы верхней границы активирует силу жесткого контакта. Значение по умолчанию: 0.1
m. Значение должно быть больше нижней границы.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Опустите жесткий упор, LB. Отрицательное смещение за пределы нижней границы активирует силу жесткого контакта. Значение по умолчанию: -0.1
m. Значение должно быть меньше верхней границы.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Введите значение постоянной жесткости жесткого упора, кГС. Значение по умолчанию: 1e6
N/m. Значение должно быть больше или равно нулю.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Введите значение постоянной демпфирования жесткого упора, bHS. Этот параметр определяет рассеивающее свойство столкнувшихся тел. Чем больше значение параметра, тем больше энергия рассеивается во время взаимодействия. Значение по умолчанию: 1e4
N/(m/s). Значение должно быть больше нуля.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Выберите модель жесткого останова:
Stiffness and damping applied smoothly through transition region, damped rebound - укажите область перехода, в которой сила масштабируется от нуля. В конце переходной области применяются полная жесткость и демпфирование. Эта модель имеет демпфирование, применяемое к отскоку, но она ограничена значением силы жесткости. В этом смысле демпфирование может уменьшить или устранить силу, обеспечиваемую жесткостью, но никогда не превышать ее. Все уравнения являются гладкими и не создают нулевых пересечений.
При выборе этой опции включается Transition region параметр.
Full stiffness and damping applied at bounds, undamped rebound - Эта модель имеет полную жесткость и демпфирование, применяемое с воздействием на верхние и нижние границы, без демпфирования на отскоке. Уравнения не создают нулевых пересечений, когда скорость изменяет знак, но существует основанное на положении пересечение нулей на границах. Отсутствие демпфирования на отскоке помогает быстро протолкнуть ползунок за это положение. Эта модель имеет нелинейные уравнения.
Full stiffness and damping applied at bounds, damped rebound - Эта модель имеет полную жесткость и демпфирование, применяемое с воздействием на верхнюю и нижнюю границы, с демпфированием, применяемым и на отскоке. Уравнения переключаются линейно, но создают пересечение нулей на основе положения. Используйте эту модель жесткого останова, если simscape.findNonlinearBlocks указывает, что это блок, который предотвращает линейное переключение всей сети.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Область, в которой сила увеличивается от нуля до полного значения. В конце переходной области применяются полная жесткость и демпфирование. Значение по умолчанию: 0.1
mm.
Выбор Stiffness and damping applied smoothly through transition region, damped rebound для модели жесткого останова этот параметр включен.
Введите начальное значение деформации пружины. Значение по умолчанию: 0
m.
Для оптимальной производительности моделирования используйте параметр «Жесткие остановки» > «Жесткая остановка» по умолчанию. No hard stops - Suitable for HIL simulation.
