Интерфейс между тепловыми жидкостями и механическими поступательными сетями
Библиотека Simscape/Foundation/Термическая жидкость/Элементы
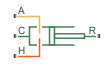
Блок поступательного механического преобразователя (TL) моделирует интерфейс между тепловой жидкостной сетью и механической вращательной сетью. Блок преобразует давление термической жидкости в механическую силу и наоборот. Может использоваться как строительный блок для линейных приводов.
Преобразователь содержит переменный объем жидкости. Температура изменяется на основе тепловой емкости этого объема. Если для параметра Динамическая сжимаемость модели (Model dynamic compressibility) задано значение Onзатем давление также развивается на основе динамической сжимаемости объема жидкости. Параметр Ориентация Mechanical (Mechanical orientation) позволяет указать, будет ли увеличение давления перемещать порт R в сторону порта C.
Порт А - это порт сохранения тепловой жидкости, связанный с входом преобразователя. Порт Н - это теплосберегающий порт, связанный с температурой жидкости внутри преобразователя. Порты R и C являются механическими передающими консервационными портами, связанными с подвижным интерфейсом и кожухом преобразователя соответственно.
Уравнение сохранения массы в объеме механического преобразователя
сжимаемость жидкости включена
где:
- массовый расход жидкости в преобразователь через порт A.
start- механическая ориентация преобразователя (1 если повышение давления жидкости вызывает положительное смещение R относительно С, -1 если повышение давления жидкости вызывает отрицательное смещение R относительно С).
start- плотность массы жидкости.
S - площадь поперечного сечения интерфейса преобразователя.
v - скорость поступательного движения интерфейса преобразователя.
V - объем жидкости внутри преобразователя.
β - объемный модуль жидкости внутри преобразователя.
α - коэффициент теплового расширения жидкости.
p - давление жидкости внутри преобразователя.
T - температура жидкости внутри преобразователя.
При подключении преобразователя к соединению Multibody используйте порт p ввода физического сигнала для задания смещения порта R относительно порта C. В противном случае блок вычисляет смещение интерфейса по относительным скоростям порта в соответствии с уравнениями блоков. Смещение границы раздела равно нулю, когда объем жидкости равен мертвому объему. Затем, в зависимости от значения параметра Ориентация Mechanical (Mechanical orientation):
Если Pressure at A causes positive displacement of R relative to C, смещение границы раздела увеличивается, когда объем жидкости увеличивается от мертвого объема.
Если Pressure at A causes negative displacement of R relative to C, смещение границы раздела уменьшается, когда объем жидкости увеличивается от мертвого объема.
Уравнение сохранения импульса в объеме механического преобразователя
pAtm) S
где:
F - сила, которую жидкость оказывает на интерфейс преобразователя.
рАтм - атмосферное давление.
Уравнение энергосбережения в объеме механического преобразователя
где:
u - внутренняя энергия жидкости.
A - общий расход энергии в объем механического преобразователя через порт A.
QH - расход тепла в объем механического преобразователя.
Стенки преобразователя несовместимы. Они не могут деформироваться независимо от внутреннего давления и температуры.
Преобразователь не содержит механических жестких упоров. Чтобы включить жесткие остановки, используйте блок поступательного жесткого останова.
Сопротивление потоку между входом и внутренней частью преобразователя является незначительным.
Тепловое сопротивление между тепловым портом и внутренней частью преобразователя ничтожно мало.
Кинетическая энергия жидкости в конвертере ничтожно мала.
Вращательный механический преобразователь (TL) | Трансляционный мультибиблиотечный интерфейс


