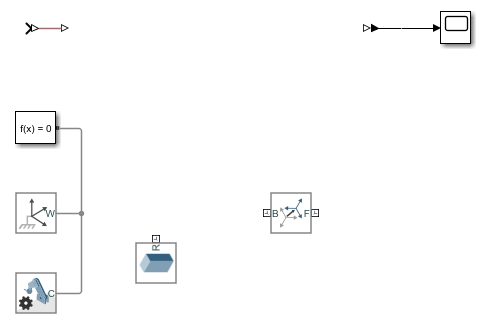
Можно запустить новую модель Simscape™ Multibody™ непосредственно из командной строки MATLAB ®, введяsmnew. smnew функция открывает шаблон модели Simscape Multibody с часто используемыми блоками и автоматическим выбором решателя с переменным шагом для достижения оптимальной производительности. На рисунке показан шаблон модели.
Также можно открыть библиотеку блоков Simscape Multibody из командной строки MATLAB, введя sm_lib. Просмотрите библиотеку, чтобы выбрать блоки для модели. Либо введите имя блока в окне Модель Simulink ® и выберите совпадение в результатах поиска Simulink.
См. раздел Моделирование простой связи для моделирования тела в шаблоне модели Simscape Multibody. См. раздел Моделирование простого маятника для интеграции тела в механизм с несколькими телами.
