Модель CAD-сборки можно импортировать из ПО Onshape ® в среду Simscape™ Multibody™. Процесс импорта выполняется в два этапа на основе smexportonshape и smimport функции. smexportonshape экспортирует модель сборки в промежуточном XML, соответствующем XML-схеме Simscape Multibody. smimport функция преобразует промежуточный XML-файл в версию Simscape Multibody исходной модели Onshape.
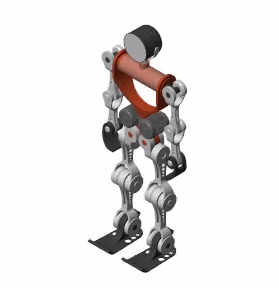
В этом примере показано, как импортировать модель Onshape сборки робота-гуманоида. Модель содержит различные части, представляющие туловище, голову и конечности робота. Детали соединяются через Revolute сопряжений, представляющих различные соединения. Модель идентична модели, показанной в разделе Импорт гуманоидной модели URDF. Введите следующий URL-адрес в веб-браузере для доступа к модели (требуется вход в систему Onshape):
https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b
Схема модели
Используйте smexportonshape для экспорта модели:
В командной строке MATLAB ® перейдите к папке, для которой имеются права на запись, например:
cd C:\Users\JDoe\Documents\ModelsСохранение URL-адреса модели в переменной MATLAB с именем assemblyURL:
assemblyURL = 'https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b';
Экспорт модели и сохранение имени XML-файла в переменной с именем exportedModel:
exportedModel = smexportonshape(assemblyURL);
Возможно, вам будет предложено войти в свою учетную запись Onshape. smexportonshape создает XML-файл описания многокомпонентного тела для этой модели и набор файлов STEP для различных геометрий детали.
Используйте smimport для импорта XML-файла описания нескольких тел:
smimport(exportedModel);
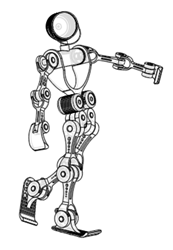
Функция генерирует модель Simscape Multibody робота-гуманоида.
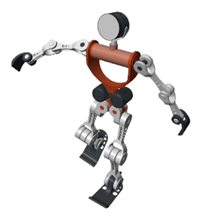
Используйте модель, например, добавляя системы управления для приведения в действие различных соединений. Для управляемого примера в командной строке MATLAB введите sm_import_humanoid_urdf. Моделирование модели для просмотра простой анимации.