Модель URDF можно импортировать в среду Simscape™ Multibody™. Процесс импорта выполняется за один шаг на основе smimport функция. smimport функция преобразует модель URDF непосредственно в эквивалентную модель Simscape Multibody.
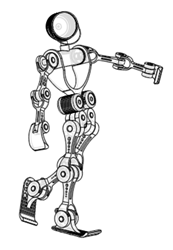
В этом примере показано, как импортировать модель сборки робота-гуманоида Onshape ®. Модель состоит из различных частей («звеньев» в жаргоне URDF), представляющих туловище, голову и конечности робота. Детали соединяются через поворотные и сварные соединения («непрерывные» и «фиксированные» соответственно). Эта модель идентична модели, показанной в разделе Импорт гуманоидной модели Onshape. Модель можно открыть из командной строки MATLAB ®, введя следующую команду:
open sm_humanoid.urdf
Схема модели
Используйте smimport для импорта модели URDF:
urdfModel = 'sm_humanoid.urdf'; smimport(urdfModel);
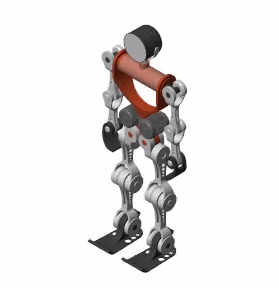
Функция генерирует модель Simscape Multibody робота-гуманоида. Расширение файла необходимо для определения файла импорта как URDF. Обновите импортированную модель (на вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model).), чтобы открыть статическую визуализацию в исходном состоянии. На рисунке показаны результаты.
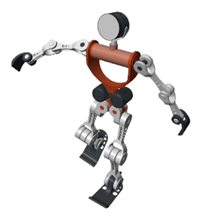
Используйте модель, например, добавляя системы управления для приведения в действие различных соединений. Для управляемого примера в командной строке MATLAB введите sm_import_humanoid_urdf. Моделирование модели для просмотра простой анимации.