В этом примере показано, как создать систему, моделирующую колесо, катящееся вниз по наклонной плоскости с помощью блока «Сила пространственного контакта».
Для создания новой модели Simscape™ Multibody™ в командной строке MATLAB ® введите:
smnew % create new Simscape Multibody model
В модели добавьте:
Один блок жесткого преобразования
Один блок соединения 6-DOF
Один цилиндрический твердотельный блок
Один блок пространственной контактной силы
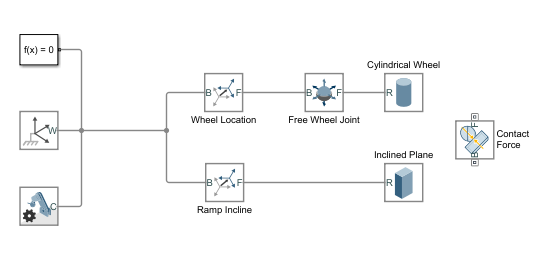
Удаление блоков области, PS-Simulink Converter и Simulink-PS Converter. Переименуйте и соедините блоки, как показано на следующем рисунке.
Назначьте этим свойствам Положение колеса:
| Собственность | Стоимость |
|---|---|
| Поворот > Метод | Aligned Axes |
| Поворот > Пара 1 > Толкатель | +Z |
| Поворот > Пара 1 > Основание | -Y |
| Поворот > Пара 2 > Толкатель | +X |
| Поворот > Пара 2 > Основание | +X |
| Перевод > Метод | None |
Присвойте этим свойствам наклонный уклон пандуса:
| Собственность | Стоимость |
|---|---|
| Поворот > Метод | Standard Axis |
| Поворот > Ось | +Y |
| Поворот > Угол | 5 deg |
| Перевод > Метод | Cartesian |
| Перевод > Смещение | [30 0 -15] cm |
Присвойте цилиндрическому колесу следующие свойства:
| Собственность | Стоимость |
|---|---|
| Геометрия > Радиус | 5 cm |
| Геометрия > Длина | 4 cm |
| Геометрия > Экспорт > Вся геометрия | selected |
| Инерция > Тип | Calculate from Geometry |
| Инерция > На основе | Density |
| Инерция > Плотность | 650 kg/m^3 |
| Графика > Напечатать | From Geometry |
| Графика > Визуальные свойства | Simple |
| Графика > Визуальные свойства > Цвет | [0.6 0.0 0.0] |
| Графика > Визуальные свойства > Непрозрачность | 1.0 |
| Кадры > Показать порт R | selected |
Назначьте следующие свойства Наклонная плоскость:
| Собственность | Стоимость |
|---|---|
| Геометрия > Размеры | [90 20 5] cm |
| Геометрия > Экспорт > Вся геометрия | selected |
| Инерция > Тип | Calculate from Geometry |
| Инерция > На основе | Density |
| Инерция > Плотность | 1000 kg/m^3 |
| Графика > Напечатать | From Geometry |
| Графика > Визуальные свойства | Simple |
| Графика > Визуальные свойства > Цвет | [0.4196 0.5569 0.1373] |
| Графика > Визуальные свойства > Непрозрачность | 1.0 |
| Кадры > Показать порт R | selected |
Назначьте этим свойствам контактную силу:
| Собственность | Стоимость |
|---|---|
| Нормальная сила > Жесткость | 1e6 N/m |
| Нормальная сила > Демпфирование | 1e3 N/(m/s) |
| Нормальная сила > Нормальная сила: ширина области перехода | 1e-4 m |
| Сила трения > Метод | Smooth Stick-Slip |
| Сила трения > Коэффициент статического трения | 0.3 |
| Сила трения > Коэффициент динамического трения | 0.3 |
| Сила трения > Критическая скорость | 0.01 m/s |
| Зондирование > Расстояние разделения | unselected |
| Зондирование > Нормальная сила | unselected |
| Зондирование > Величина силы трения | unselected |
На вкладке Моделирование (Modeling) выберите Параметры модели (Model Settings) > Параметры модели (Model Settings), чтобы открыть окно Параметры конфигурации (Configuration Parameters). На панели Решатель (Solver) в разделе Сведения о решателе (Solver details) обновите следующее.
| Максимальный размер шага: | 1e-3 |
| Абсолютный допуск: | 1e-3 |
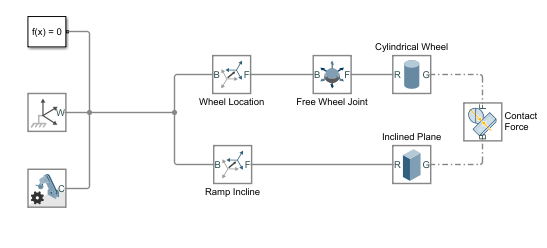
В этой точке как блок цилиндрического колеса, так и блок наклонной плоскости должны иметь геометрический порт. Как показано на рисунке, соедините порты геометрии блоков наклонной плоскости и цилиндрического колеса с портами основания и толкателя блока силы пространственного контакта соответственно.
На вкладке Моделирование (Simulation) щелкните Выполнить (Run). В окне MATLAB откроется панель Mechanics Explorer, на которой будет показано, как цилиндрическое колесо скатывается вниз по поверхности.
Описанный выше процесс моделирования может быть использован для разработки более сложных моделей, которые включают в себя контактные силы. Для просмотра более сложной модели в командной строке MATLAB введите:
sm_bumper_car % open Simscape Multibody bumper car model
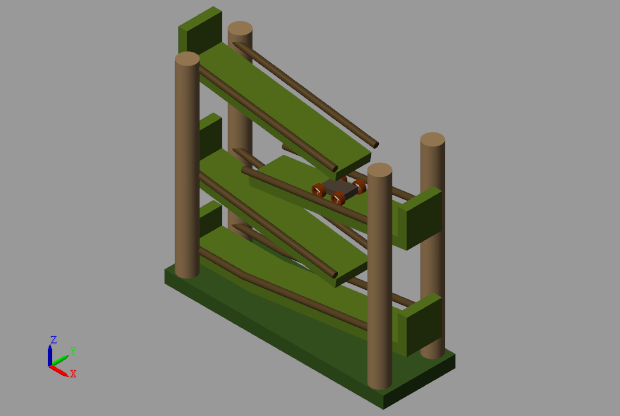
Открытый Bumper Car Playset.
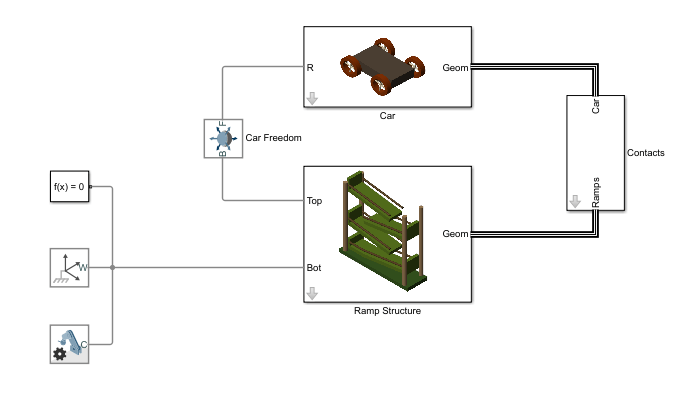
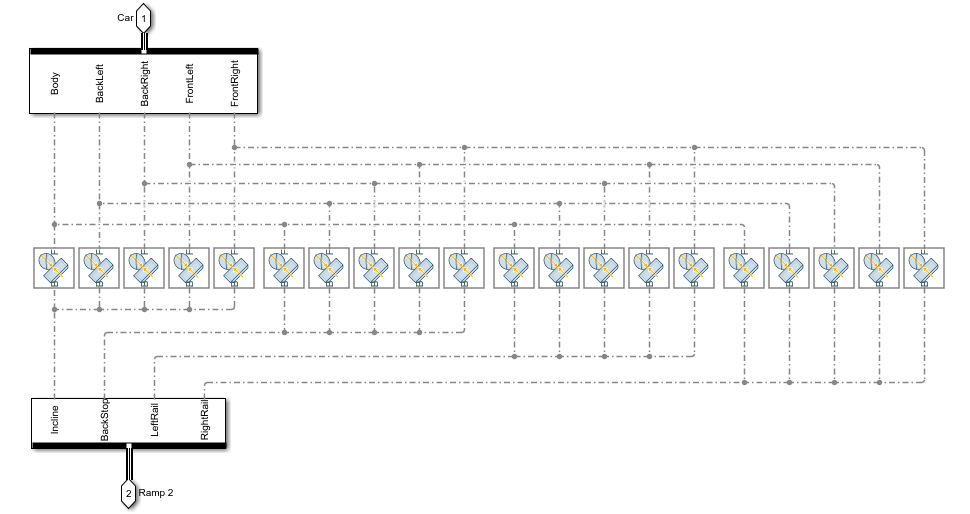
Модель выполнена из двух конструкций: Car и Ramp Structure. Блоки пространственной контактной силы, которые используются для моделирования контактных сил между каждым колесом автомобиля и пандусами, размещены в Car to Ramp подсистем.
Для моделирования модели на вкладке Моделирование (Simulation) щелкните Выполнить (Run). В обозревателе Mechanics можно увидеть бампер, катящийся по нескольким пандусам.