Приложение контактных усилий между парой соединенных тел
Simscape/Multibody/Силы и крутящие моменты

Блок «Пространственная сила контакта» моделирует контакт между парой тел с помощью штрафного метода. Этот метод позволяет телам проникать в небольшом количестве для вычисления контактных сил. Блок прикладывает нормальные и фрикционные контактные силы между соединенным основанием и ведомыми телами.
Нормальная контактная сила вычисляется с использованием уравнения силы классической системы пружина-демпфер. Во время контакта нормальная контактная сила пропорциональна ее соответствующей глубине проникновения и скорости. Ширина переходной области определяет переходную область для уравнений силы. В то время как глубина проникновения перемещается через переходную область, блок плавно увеличивает силу. В конце переходной области применяются полная жесткость и демпфирование. При отскоке и жесткость, и демпфирующие силы плавно уменьшаются обратно до нуля. Этот плавный переход устраняет разрывы в уравнениях силы и устраняет события пересечения нуля. Чем больше ширина области перехода, тем более плавный тренд перехода контактной силы. В отличие от этого, когда ширина переходной области уменьшается до нуля, контактная сила имеет тенденцию иметь более резкий переход, который ведет себя как прерывистая проблема.
Чтобы лучше обнаруживать контакты, если значение параметра Ширина области перехода (Transition Region Width) мало, блок Пространственная сила контакта (Spatial Contact Force) поддерживает необязательное обнаружение пересечения нуля. События пересечения нуля происходят только тогда, когда расстояние разделения изменяется с положительного или нулевого на отрицательное и наоборот.
Примечание
Обнаружение пересечения нуля блока пространственной контактной силы отличается от исходного обнаружения пересечения нуля блоков Simulink ®, таких как Из файла (From File) и Интегратор (Integrator), поскольку уравнение силы пространственной контактной силы является непрерывным. Дополнительные сведения об обнаружении пересечения нулей блоков Simulink см. в разделе Обнаружение пересечения нулей.
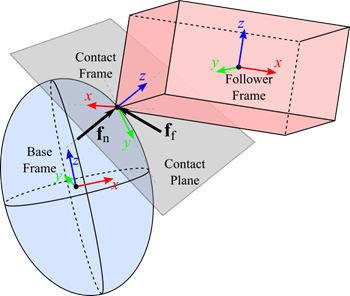
Каждое тело имеет контактную раму, начало которой расположено в точке контакта и ось Z которой выровнена с направлением нормали контакта. Когда поверхность гладкая вблизи точки контакта, нормаль контакта является нормалью внешней поверхности в точке контакта. Когда поверхность не гладкая, нормаль контакта вычисляется с помощью других средств, но она всегда указывает наружу от тела вблизи точки контакта. Во время непрерывного контакта контактная рама перемещается вокруг корпуса при перемещении точки контакта.
На схеме показана контактная рамка для основного корпуса. Контактные усилия прикладываются к двум твердым телам в начале контактной рамы в соответствии с третьим законом Ньютона:
Нормальная сила, fn, которая выровнена по оси Z контактной рамы. Эта сила раздвигает твердые тела, чтобы уменьшить проникновение.
Сила трения, ff, которая лежит в плоскости контакта. Эта сила противодействует относительным тангенциальным скоростям между двумя телами вблизи области проникновения.
Блок силы пространственного контакта поддерживает различные геометрии и тела. Например, он поддерживает все твердотельные блоки в библиотеке «Элементы тела» и блоки «Бесконечная плоскость» и «Точка» в библиотеке «Кривые и поверхности».
Примечание
Для блоков Файл (File) Твердое тело (Solid) и Повернутое тело (Revolved Solid) их физические свойства, такие как масса и инерция, основаны на истинной геометрии, но контактное моделирование основано на выпуклой геометрии корпуса. Пример см. на следующем рисунке.
Контакты между твердыми телами
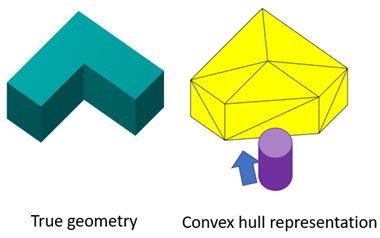
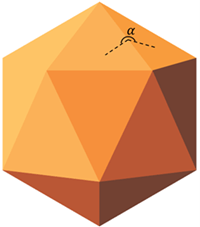
Выпуклые корпуса обычно используются для представления геометрической границы, когда истинная геометрия представляет алгоритмическую сложность. Выпуклый корпус - наименьший выпуклый многогранник, содержащий все вершины истинной геометрии. Для выпуклого корпуса наружный угол (α) между парой смежных граней должен быть больше или равен 180 градусам.
Выпуклый корпус
Stiffness - Сопротивление контактной пружины геометрическому проникновению1e6 N/m (по умолчанию)Жесткость пружины является постоянным значением, которое представляет контактную силу двух сталкивающихся твердых тел. Чем больше значение жесткости пружины, тем сильнее контакт между твердыми элементами корпуса.
Damping - Сопротивление контактного демпфера движению при проникающей геометрии1e3 N/(m/s) (по умолчанию)Коэффициент демпфирования является постоянным значением, которое представляет собой потерянную энергию от столкновения твердых тел. Чем больше значение коэффициента демпфирования, тем больше энергии теряется при столкновении геометрий и тем быстрее гасятся контактные колебания. Нулевое значение можно использовать для моделирования совершенно упругих столкновений, которые экономят энергию.
Transition Region Width - Область, над которой сила демпфера пружины поднимается до полного значения1e-4 m (по умолчанию)Ширина переходной области, выраженная как глубина проникновения. Чем меньше область, тем резче начало контакта и меньше временной шаг, необходимый для решателя. Уменьшение области перехода повышает точность модели, а расширение - скорость моделирования.
Method - Закон о фрикционной силеSmooth Stick-Slip (по умолчанию) | NoneСила трения - это сила, которая лежит по касательной в контактной раме и перпендикулярна нормальной силе. Выбор Smooth Stick-Slip обеспечивает более реалистичную динамику контактов.
Smooth Stick-SlipКогда Smooth Stick-Slip выбирают, сила трения непрерывна относительно относительной тангенциальной скорости вблизи области проникновения. На этом графике показано влияние силы трения:
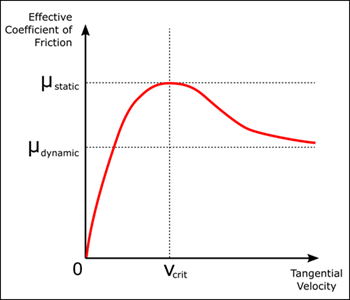
micstatic - коэффициент статического трения, micdynamic - коэффициент динамического трения, vcrit - критическая скорость.
NoneКогда None выбирается, сила трения не прикладывается.
Coefficient of Static Friction - Отношение величины силы трения к величине нормальной силы0.5 (по умолчанию)Отношение величины силы трения к величине нормальной силы, когда тангенциальная скорость близка к нулю.
Это значение определяется свойствами материала контактирующих твердых тел. Он всегда неотрицателен и часто меньше единицы, хотя для материалов с высоким коэффициентом трения возможны значения больше единицы. В большинстве случаев это значение должно быть выше коэффициента динамического трения.
Чтобы включить этот параметр, установите для параметра Method значение Smooth Stick-Slip.
Coefficient of Dynamic Friction - Отношение величины силы трения к величине нормальной силы0.3 (по умолчанию)Отношение величины силы трения к величине нормальной силы при большой тангенциальной скорости.
Это значение определяется свойствами материала контактирующих твердых тел. Он всегда неотрицателен и часто меньше единицы, хотя для материалов с высоким коэффициентом трения возможны значения больше единицы. В большинстве случаев это значение должно быть ниже коэффициента статического трения.
Чтобы включить этот параметр, установите для параметра Method значение Smooth Stick-Slip.
Critical Velocity - Скорость, определяющая смешение между статическим и динамическим коэффициентами трения1e-3 m/s (по умолчанию)Когда критическая скорость равна величине тангенциальной скорости, эффективный коэффициент трения равен заданному коэффициенту статического трения. Когда величина тангенциальной скорости увеличивается сверх этой величины, эффективный коэффициент трения асимптотически приближается к заданному коэффициенту динамического трения.
Чтобы включить этот параметр, установите для параметра Method значение Smooth Stick-Slip.
Separation Distance - Расстояние между двумя твердыми теламиcleared (по умолчанию) | провереноВыберите для измерения расстояния между двумя твердыми телами. Если два твердых тела не проникают, это неотрицательное значение, равное минимальному расстоянию между двумя геометрическими элементами. Если два твердых тела проникают, это отрицательное значение равно глубине проникновения.
Normal Force - Величина нормальной контактной силы между двумя соединенными твердыми теламиcleared (по умолчанию) | провереноВыберите для измерения величины нормальной контактной силы между двумя соединенными твердыми телами.
Frictional Force Magnitude - Величина силы фрикционного контакта между двумя соединенными твердыми теламиcleared (по умолчанию) | провереноВыберите для измерения величины силы фрикционного контакта между двумя соединенными твердыми телами.
Detect Contact Start and End - Обнаружение начала и конца контактов как событий пересечения нулейcleared (по умолчанию) | провереноВыберите этот параметр, чтобы определить начало и конец каждого контакта как события пересечения нуля. События пересечения нуля происходят, когда расстояние разделения изменяется с положительного или нулевого на отрицательное и наоборот.
Кирпичное тело | Цилиндрическое твердое тело | Выдавленное твердое тело | Твердое тело файла | Сферическое твердое тело





