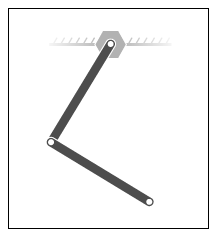
В этом примере показано, как моделировать двойной маятник - простую кинематическую цепь, состоящую из двух движущихся тел, соединенных последовательно двумя поворотными соединениями. Третий корпус представляет собой механическое заземление и жестко соединен с инерционной рамой Мира. Обычайsmdoc_compound_rigid_bodies библиотека содержит блоки подсистем тела, используемые в примере.
Блоки соединения вращения (Revolute Joint) позволяют моделировать соединения, соединяющие смежные тела, и помогают задать их начальные состояния. Simscape™ Multibody™ программное обеспечение точно удовлетворяет общей цели состояния, если она является кинематически действительной и не конфликтует с другими целями состояния. Параметр Приоритет (Priority) позволяет указать, какие цели необходимо выполнить в первую очередь.
Запустите новую модель.
Перетащите эти блоки в модель. Два блока поворотного соединения обеспечивают двойной маятник двумя степенями свободы вращения.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Утилиты | Конфигурация решателя | 1 |
| Simscape > Multibody > Утилиты | Конфигурация механизма | 1 |
| Simscape > Multibody > Кадры и преобразования | Мировая рамка | 1 |
| Simscape > Multibody > Соединения | Шарнир вращения | 2 |
В командной строке MATLAB ® введитеsmdoc_compound_rigid_bodies. Откроется пользовательская библиотека блоков с таким именем.
Перетащите эти пользовательские блоки в модель. Каждый блок представляет собой тело в двойном маятнике.
| Блок | Количество |
|---|---|
| Поворотное крепление | 1 |
| Двоичный канал A | 2 |
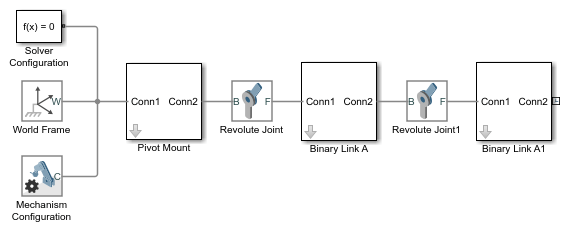
Подключите блоки, как показано на рисунке.
В диалоговых окнах блока «Поворотное соединение» выберите «Цели состояния» > «Указать цель положения». Теперь можно задать требуемые начальные положения двух соединений.
В поле «Значение» введите эти углы соединения.
| Имя блока | Значение (градусы) |
|---|---|
| Шарнир вращения | 30 |
| Револьют Joint1 | -75 |
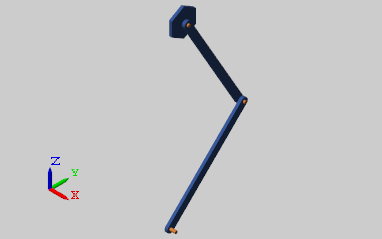
Для визуализации модели обновите блок-схему. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model). Откроется Mechanics Explorer с видом 3-D сборки двойного маятника. Нажмите кнопку изометрического вида, чтобы получить перспективу на рисунке.
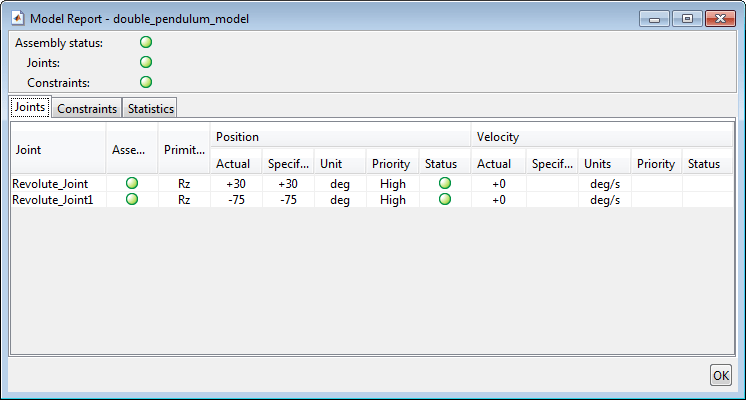
Чтобы проверить статус сборки вращающихся соединений, используйте утилиту Отчет о модели (Model Report). Эту утилиту можно открыть в строке меню Проводника Mechanics, выбрав Инструменты (Tools) > Отчет о модели (Model Report). На рисунке показана информация о сборке двойного маятника.
Запустите моделирование. Mechanics Explorer показывает анимацию 3-D сборки двойного маятника. Сборка перемещается под действием силы тяжести, заданной в блоке Конфигурация механизма (Mechanism Configuration).
Для просмотра полной модели сборки двойного маятника в командной строке MATLAB введите:
smdoc_double_pendulum
