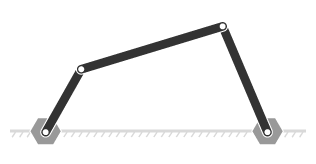
В этом примере показано, как моделировать четыре стержня - замкнутую кинематическую цепь, состоящую из четырех тел, которые соединяются через поворотные соединения. Одно из звеньев закреплено на рамке «Мир» и действует как грунт. Здесь эта связь заменена двумя поворотными опорами, соединенными посредством жесткого преобразования перемещения. Обычайsmdoc_compound_rigid_bodies библиотека содержит блоки подсистем тела, используемые в примере.
Блоки соединения вращения (Revolute Joint) позволяют моделировать соединения, соединяющие смежные тела, и помогают задать их начальные состояния. Simscape™ Multibody™ программное обеспечение точно удовлетворяет общей цели состояния, если она является кинематически действительной и не конфликтует с другими целями состояния. Параметр Приоритет (Priority) позволяет указать, какие цели необходимо выполнить в первую очередь.
Для моделирования четырехполосной связи:
Запустите новую модель.
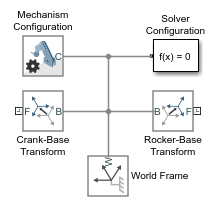
Перетащите эти блоки в модель. Блоки жесткого преобразования определяют расстояние между двумя опорными опорами. Это расстояние является длиной неявной линии связи с землей.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Утилиты | Конфигурация решателя | 1 |
| Simscape > Multibody > Утилиты | Конфигурация механизма | 1 |
| Simscape > Multibody > Кадры и преобразования | Мировая рамка | 1 |
| Simscape > Multibody > Кадры и преобразования | Жесткое преобразование | 2 |
Подключите блоки и присвойте им имя, как показано на рисунке. Порты базовой рамы блоков жесткого преобразования должны соединяться с блоком мировой рамы.
Из библиотеки «Simscape > Multi body > Joints» перетащите в модель четыре блока «Revolute Joint».
В командной строке MATLAB ® введитеsmdoc_compound_rigid_bodies. Открывается пользовательская библиотека с блоками подсистемы составного тела.
От smdoc_compound_rigid_bodies перетащите следующие блоки.
| Блок | Количество |
|---|---|
| Поворотное крепление | 2 |
| Двоичный канал A | 2 |
| Двоичный канал B | 1 |
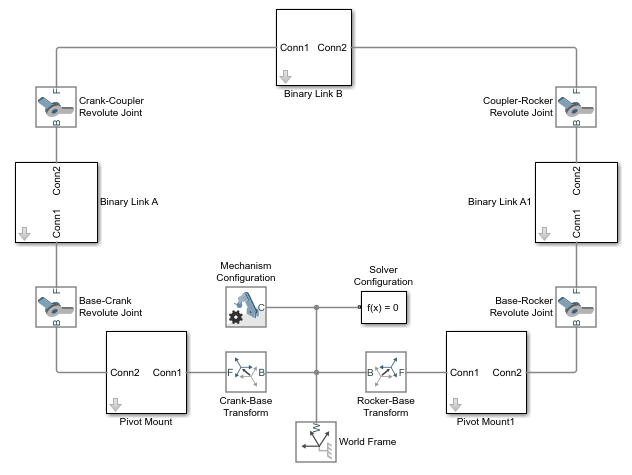
Подключите блоки и присвойте им имя, как показано на рисунке. Необходимо точно расположить порты кадра блоков подсистемы пользовательского тела, как показано на рисунке.
В диалоговых окнах блока «Жесткое преобразование» задайте смещение между опорными опорами и мировой рамой. Предполагается, что шарнирные опоры расположены симметрично относительно этой рамы.
| Параметр | Преобразование «кривошип-база» | Преобразование Rocker-Base |
|---|---|---|
| Перевод > Метод | Standard Axis | Standard Axis |
| Перемещение > Ось | -Y | +Y |
| Перевод > Смещение | 15 в единицах cm | 15 в единицах cm |
В каждом диалоговом окне блока двоичной связи укажите параметр длины.
| Блок | Длина (см) |
|---|---|
| Двоичный канал A | 10 |
| Двоичный канал B | 35 |
| Двоичная ссылка A1 | 20 |
Направьте сборку модели, указав требуемое начальное состояние для одного или нескольких соединений в модели. Чтобы задать начальный угол 30 ° для соединения Основание (Base) - Кривошип (Crank), выполните следующие действия.
В диалоговом окне «Блок соединения вращения базового кривошипа» разверните узел «Цели состояния» и выберите «Указать цель положения».
В поле «Значение» введите -30 и нажмите OK.
На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model).
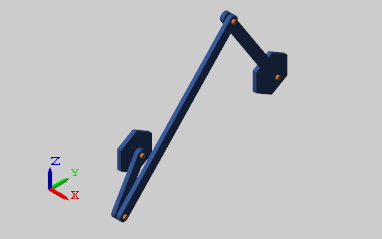
Откроется Mechanics Explorer со статическим отображением четырехполосной связи в ее начальной конфигурации. Если указанные цели совместного состояния являются допустимыми и совместимыми, начальная конфигурация точно соответствует этим целям состояния.
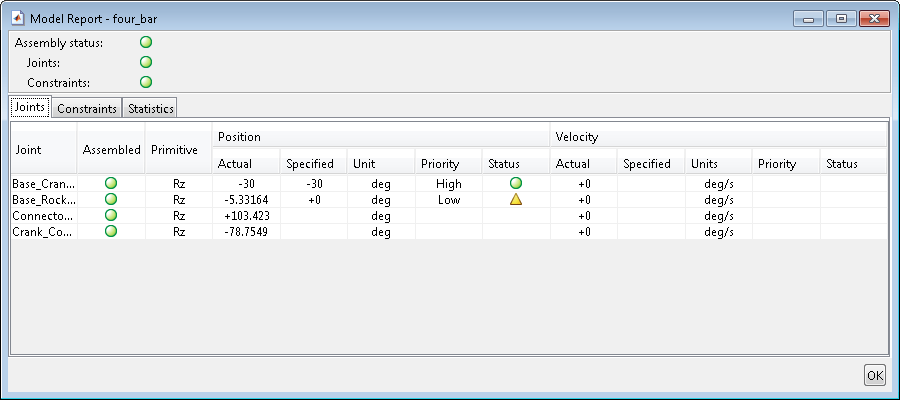
Чтобы проверить, были ли достигнуты (и насколько точно) цели состояния, можно использовать средство просмотра переменных Simscape или отчет модели Simscape Multibody.
Чтобы открыть средство просмотра переменных Simscape, в коллекции «Приложения» выберите пункт «Средство просмотра переменных Simscape». Чтобы открыть отчет Simscape Multibody Model Report, обновите схему и в строке меню Проводника Mechanics выберите Сервис > Отчет о модели.
На рисунке показан пример отчета о модели. Желтый маркер указывает, что цель состояния Base-Rocker Revolute Joint была удовлетворена приблизительно только. Оставшийся зеленый маркер указывает, что оставшееся состояние цели было удовлетворено точно.
Запустите моделирование. В обозревателе Mechanics отображается анимация 3-D сборки из четырех панелей. Сборка перемещается под действием силы тяжести, заданной в блоке Конфигурация механизма (Mechanism Configuration).
Для просмотра полной модели четырехлинейной сборки в командной строке MATLAB введите:
smdoc_four_bar
