Синхронное полеориентированное управление станком с постоянным магнитом
Simscape / Электрический / Контроль / Контроль PMSM
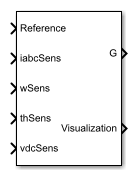
Блок управления, ориентированный на поле PMSM, реализует ориентированную на поле структуру управления для синхронной машины с постоянными магнитами (PMSM). Управление с ориентацией на поле (ВОК) - это эффективная стратегия управления электродвигателем переменного тока, которая разъединяет крутящий момент и поток путем преобразования токов стационарной фазы во вращающуюся раму. Используйте ВОК, если скорость вращения и положение ротора известны и требуется:
Высокий крутящий момент и низкий ток при запуске.
Высокая эффективность.
Структура ВОК PMSM разъединяет крутящий момент и поток с помощью опорной рамы ротора d-q. На этой схеме показана общая архитектура блока.
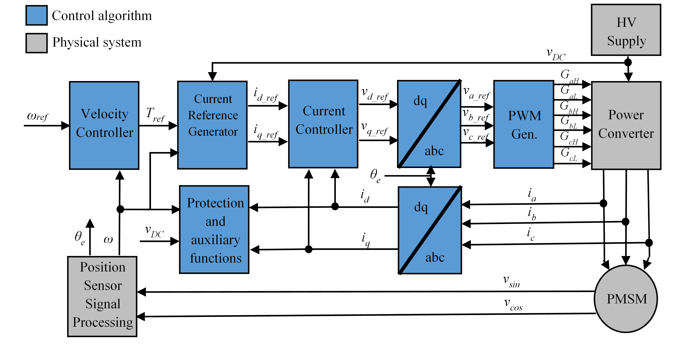
На схеме:
λ и startref - измеренная и опорная угловые скорости, соответственно.
Треф - эталонный электромагнитный момент.
i и v - токи и напряжения статора, а нижние индексы d и q - оси d и q, а нижние индексы a, b и c - три обмотки статора.
starte - электрический угол ротора.
G представляет собой импульс затвора, нижние индексы H и L представляют собой высокие и низкие индексы, а нижние индексы a, b и c представляют три обмотки статора.
Вы можете реализовать управление скоростью или крутящим моментом с помощью Control mode параметр. Блок осуществляет управление скоростью точно так, как показано на диаграмме. Блок осуществляет управление крутящим моментом путем удаления блока контроллера скорости и непосредственного принятия опорного крутящего момента.
Параметры машины известны.
Управляющая структура реализована с одной частотой дискретизации.
[1] Бернардес, Т., В. Ф. Монтагнер, Х. А. Грюндлинг и Х. Пиньейро. «Наблюдатель дискретно-временного режима скольжения для безсенсорного векторного управления синхронной машиной с постоянными магнитами». Сделки IEEE по промышленной электронике. Том 61, номер 4, 2014, стр. 1679-1691.
[2] Карпук, С. и К. Лазар. «Быстрое управление прогнозируемым током в режиме реального времени в синхронных автомобильных тяговых приводах с постоянным магнитом». Сделки IEEE по электрификации транспорта. Vol.1, номер 4, 2015, стр. 326-335.
[3] Хак, М. Э., Л. Чжун и М. Ф. Рахман. «Улучшенное управление траекторией для синхронного привода с внутренним постоянным магнитом с расширенным рабочим пределом». Журнал электротехники и электроники. Том 22, номер 1, 2003, стр. 49.
[4] Ян, Н., Г. Ло, В. Лю и К. Ван. «Управление синхронным электродвигателем внутреннего постоянного магнита для электромобиля с использованием справочной таблицы». В 7-й Международной конференции по электронике и управлению движением. Том 2, 2012, стр. 1015-1019.
