Дискретно-временной синхронный магнитный контроллер тока машины с предварительным управлением
Simscape / Электрический / Контроль / Контроль PMSM
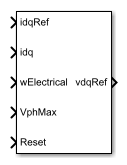
Контроллер тока PMSM с блоком предварительного управления реализует контроллер тока синхронной машины с постоянными магнитами на основе дискретного времени PI (PMSM) в опорном кадре ротора d-q с предварительным управлением внутренней обратной связью.
Этот блок обычно используется в ряде блоков, составляющих структуру управления.
Можно создать текущую привязку в кадре d-q, которая будет использоваться в качестве входа в этот блок с помощью генератора текущих привязок PMSM.
Можно получить опорный сигнал напряжения в области abc, преобразовав выходной сигнал этого блока с помощью блока обратного преобразования парковки.
В блоке управления PMSM Field-Oriented можно увидеть пример полной структуры управления - от измерений на станке до вводов на станке.
Блок дискретизируется с использованием обратного метода Эйлера благодаря простоте и стабильности первого порядка.
Два контроллера тока PI, реализованные в системе отсчета ротора, создают вектор опорного напряжения:
vd _ FF,
и
vq _ FF,
где:
и - опорные напряжения d-оси и q-оси соответственно.
и - опорные токи d-оси и q-оси соответственно.
и - токи d-оси и q-оси соответственно.
Kp_id и Kp_iq являются пропорциональными коэффициентами усиления для контроллеров d-оси и q-оси соответственно.
Ki_id и Ki_iq являются интегральными коэффициентами усиления для контроллеров d-оси и q-оси соответственно.
Ts - время выборки дискретного контроллера.
vd_FF и vq_FF являются напряжениями прямой связи для d-оси и q-оси соответственно.
Питающие напряжения получаются из математических уравнений машины:
и
λ м),
где:
starte - электрическая скорость ротора.
Ld и Lq являются индуктивностями d-оси и q-оси соответственно.
λ м - связь постоянного магнитного потока.
Использование управления PI приводит к нулю в функции передачи с замкнутым контуром, что может привести к нежелательному превышению отклика с замкнутым контуром. Этот ноль может быть отменен путем введения блока отмены нуля в пути передачи. Функции переноса отмены нуля за дискретное время:
idKp _ idKi _ id),
и
iqKp _ iqKi _ iq).
Насыщение должно быть наложено, когда вектор напряжения статора превышает предел фазы напряжения Vph_max:
где vd и vq - напряжения d-оси и q-оси соответственно.
В случае приоритизации осей вводятся напряжения v1 и v2, где:
v1 = vd и v2 = vq для определения приоритетов d-оси.
v1 = vq и v2 = vd для приоритизации по оси q.
Ограниченные (насыщенные) напряжения и получают следующим образом:
Vph _ max)
и
V2 _ max),
где:
и являются неограниченными (ненасыщенными) напряжениями.
v2_max - максимальное значение v2, не превышающее предела фазы напряжения, заданного v1sat) 2.
В случае, когда прямая и квадратурная оси имеют одинаковый приоритет (эквивалентность d-q), ограниченные напряжения получают следующим образом:
, Vd _ max)
и
Vq _ max),
где:
vqunsat) 2
и
vqunsat) 2.
Для предотвращения насыщения выходного сигнала интегратора используется противообмоточный механизм. В такой ситуации выигрыш интегратора становится следующим:
vdunsat)
и
vqunsat),
где Kaw_id, Kaw_iq и Kaw_if - коэффициенты усиления против витков для контроллеров d-оси, q-оси и поля соответственно.
Модель установки для прямой и квадратурной оси может быть аппроксимирована системой первого порядка.
Это решение управления используется только для синхронных двигателей с постоянным магнитом с синусоидальным распределением потока и обмотками поля.
[1] Бернардес, Т., В. Ф. Монтагнер, Х. А. Грюндлинг и Х. Пиньейро. «Наблюдатель дискретно-временного режима скольжения для безсенсорного векторного управления синхронной машиной с постоянными магнитами». Сделки IEEE по промышленной электронике. Том 61, номер 4, 2014, стр. 1679-1691.
[2] Карпук, С. и К. Лазар. «Быстрое управление прогнозируемым током в режиме реального времени в синхронных автомобильных тяговых приводах с постоянным магнитом». Сделки IEEE по электрификации транспорта. Vol.1, номер 4, 2015, стр. 326-335.








