Контроллер ослабления поля синхронной машины с постоянным магнитом
Simscape / Электрический / Контроль / Контроль PMSM
Блок контроллера ослабления поля PMSM реализует контроллер ослабления поля для синхронной машины с постоянными магнитами (PMSM).
Этот блок используется для наложения ограничений фазового напряжения на управляемую током PMSM. Блок уменьшает фазовое напряжение PMSM, регулируя угол вектора опорного тока, когда величина вектора напряжения превышает его предел. Блок не регулирует амплитуду вектора тока.
Этот блок можно использовать как часть системы управления PMSM:
Используйте метод управления нулевой d-осью, чтобы создать неограниченный текущий опорный вектор для управления PMSM. Эту стратегию можно реализовать с помощью блока генератора текущих ссылок PMSM.
Этот блок используется для регулировки угла опорного вектора тока, чтобы удовлетворить фазовым ограничениям напряжения.
Используйте контроллер тока PMSM для генерации опорного вектора напряжения для управления PMSM.
Внутренний интегральный контроллер выдает коэффициент β∈[0,1], который определяется тем, насколько близко требуемое напряжение статора приближается к значению напряжения насыщения в любой момент времени:
Когда требуемое напряжение статора превышает предел, β стремится к 0, уменьшая ток по оси q.
Когда требуемое напряжение статора находится в пределах его предела, β стремится к 1 и угол остается неизменным.
На этой диаграмме показана структура контроллера ослабления поля.
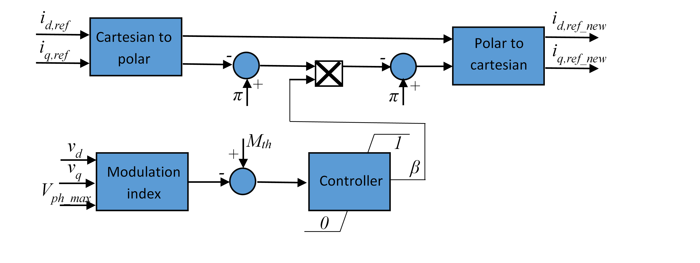
На диаграмме в качестве входного параметра блока указывается пороговое значение Mth индекса модуляции, и блок вычисляет индекс M модуляции как отношение между фактическим фазовым напряжением и максимальным доступным фазовым напряжением Vph_max:
_ max,
где vd и vq - компоненты d-оси и q-оси вектора напряжения.
[1] Вай, Дж. и Т. М. Джанса. «Новый метод управления для достижения широкой постоянной скорости вращения с помощью внутреннего генератора переменного тока PM». Конференция по отраслевым приложениям. Том 2, 2001, стр. 807-814.
