Синхронное машинное полевое управление
Управление Simscape/Electrical/Control/SM
Блок управления, ориентированный на поле SM, реализует структуру управления, ориентированную на поле синхронной машины (SM). Управление с ориентацией на поле (ВОК) - это эффективная стратегия управления электродвигателем переменного тока, которая разъединяет крутящий момент и поток путем преобразования токов стационарной фазы во вращающуюся раму. Используйте ВОК, если скорость вращения и положение ротора известны и требуется:
Высокий крутящий момент и низкий ток при запуске
Высокая эффективность
ВОК SM состоит из нескольких блоков управления из библиотеки управления. Для просмотра и изменения этих блоков и внутренней структуры ВОК щелкните правой кнопкой мыши блок в меню «Simulink» и выберите «Mask» > «Look Under Mask». Общая структура управления состоит из нескольких частей:
Контроллер внешнего контура преобразует опорный сигнал, подаваемый в опорные токи d-оси, q-оси и поля.
Тип опорного сигнала можно выбрать с помощью Control mode параметр:
Velocity control - Управление или регулирование скорости вращения синхронной машины. Внутренний блок контроллера скорости генерирует опорный крутящий момент из ошибки частоты вращения ротора.
Torque control - Контроль или регулирование механического крутящего момента ПЛ.
Внутренний блок генератора опорных токов ПЛ генерирует опорные токи с использованием пропорционально-интегрального (PI) контроллера, минимизируя ошибку крутящего момента.
Контроллер внутреннего контура преобразует опорные токи в опорные напряжения. Внутренний контроллер тока ПЛ генерирует опорные напряжения, используя PI-контроллер, минимизирующий ошибку тока, и условия обратной связи:
vf_FF=0
где:
starte - электрическая угловая скорость ротора.
Ld и Lq - индуктивности статора по осям d- и q.
Lmf - индуктивность якоря взаимного поля.
id, iq и если, являются токами возбуждения статора d-q и поля соответственно.
Генератор ШИМ преобразует опорные напряжения статора в импульсы затвора для передачи на преобразователь мощности, который питает обмотки статора синхронной машины.
Генератор PWM возбуждения преобразует напряжение опорного поля в импульсы затвора, которые должны быть поданы на прерыватель постоянного тока, питающий обмотку поля SM.
На этой схеме показана общая архитектура блока.
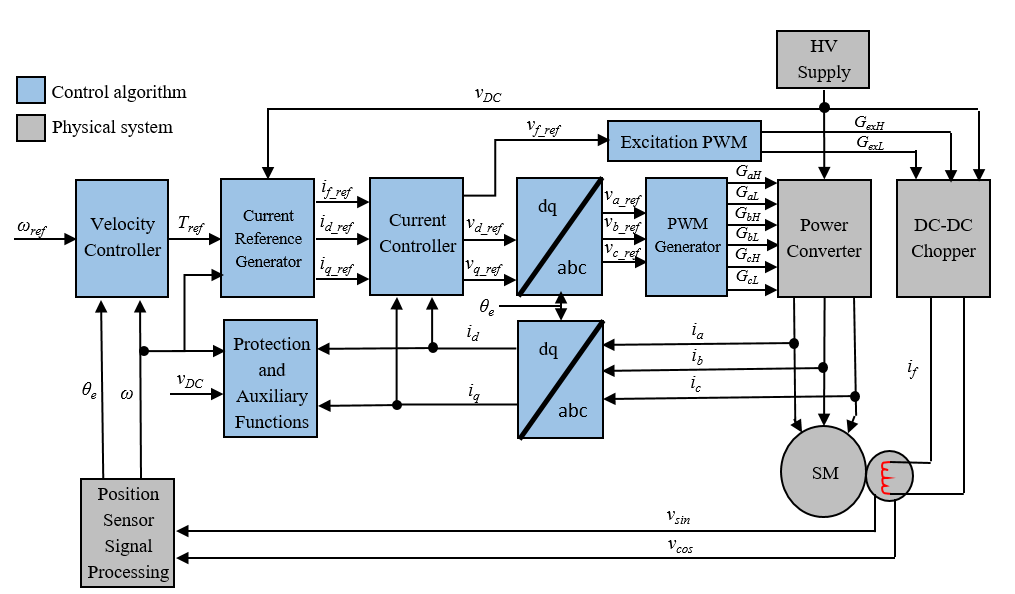
На схеме:
λ и startref - измеренная и опорная угловые скорости, соответственно.
Треф - эталонный электромагнитный момент. При настройке блока управления скоростью контроллер скорости генерирует этот опорный крутящий момент.
i и v - токи и напряжения статора. Подстрочные индексы d, q и f представляют d-ось, q-ось и обмотку поля. Нижние индексы a, b и c представляют три обмотки статора.
starte - электрический угол ротора.
G является импульсом затвора, нижние индексы H и L представляют высокие и низкие, а нижние индексы a, b и c представляют три обмотки статора. Нижний индекс ex представляет импульсы возбуждения поля.
Вы можете реализовать управление скоростью или крутящим моментом с помощью Control mode параметр. Блок осуществляет управление скоростью точно так, как показано на диаграмме. Блок осуществляет управление крутящим моментом путем удаления блока контроллера скорости и непосредственного принятия опорного крутящего момента.
Параметры машины известны.
Управляющая структура реализована с одной частотой дискретизации.
[1] Миргнер, М. и В. Хакманн. «Проблемы управления синхронной машиной с внешним возбуждением в приложении автомобильного тягового привода». В Emobility-Electric Power Train. (2010): 1–6.
[2] Карпук, С., К. Лазар и Д. Патраску. «Оптимальное управление крутящим моментом синхронной машины с внешним возбуждением». Журнал контрольно-технической и прикладной информатики. 14, № 2 (2012): 80-88.

