Дискретно-временной регулятор скорости
Simscape/Electrical/Control/Общее управление машиной
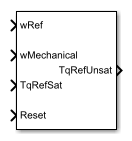
Блок контроллера скорости реализует контроллер скорости в дискретное время.
В качестве входных данных блока указываются измеренные и эталонные скорости ротора (w и wref). Затем блок выдает опорный крутящий момент Tref для электрического привода.
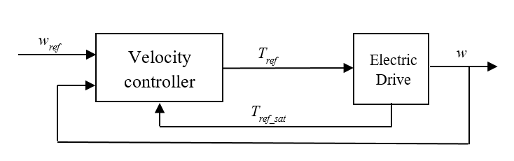
Для предотвращения витка в интеграторе подайте насыщенный опорный крутящий момент Tref_sat от электропривода обратно в регулятор скорости.
Можно управлять угловой скоростью ротора с дискретным временем Ts выборки с помощью одного из трех общих подходов:
Пропорционально-интегральный (PI) контроль, с пропорциональными и интегральными коэффициентами усиления Kp_w и Ki_w:
− w)
Пропорциональное (P) управление, с пропорциональным усилением Kp_w:
wref − w)
Управление P-PI, характеризующееся двухскоростным контуром обратной связи, как показано на следующем рисунке:
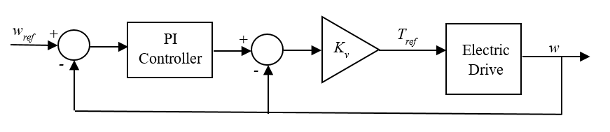
Здесь блок PI контроллера структурирован, как в стратегии PI управления, и Kv является пропорциональным усилением для P контроллера.
Использование управления PI приводит к нулю в функции передачи с замкнутым контуром, что может привести к нежелательному превышению отклика с замкнутым контуром. Этот ноль может быть отменен путем введения блока отмены нуля в пути передачи. Функция переноса отмены нуля за дискретное время
wKi _ wKp _ wKi _ w)
Control type - Модель управленияPI control (по умолчанию) | P control | P-PI controlТип контроллера:
PI control - Пропорционально-интегральное управление с использованием одного контура обратной связи
P control - Пропорционально-интегральное управление с использованием одного контура обратной связи
P-PI control - Пропорциональное и пропорционально-интегральное управление с использованием двойной обратной связи
Опции Тип управления (Control type) влияют на видимость или конфигурируемость следующих параметров:
Интегральный коэффициент усиления контроллера
Пропорциональный коэффициент усиления контроллера P
Усиление защиты от навивки
Интегральное усиление защиты от навивки
Время выборки (-1 для унаследованных)
Включить отмену нуля
Controller proportional gain - Пропорциональный коэффициент усиления1 (по умолчанию) | положительный скалярПропорциональный коэффициент усиления для:
Контроллер PI
Контроллер P в одноконтурной модели управления
Контроллер PI в контроллере P-PI
Controller integral gain - Интегральное усиление1 (по умолчанию) | положительный скалярИнтегральное усиление для контроллера PI или P-PI.
Этот параметр отображается только в том случае, если для параметра Control type установлено значение PI control или P-PI control.
P controller proportional gain - Пропорциональный коэффициент усиления P1 (по умолчанию) | положительный скалярПропорциональный коэффициент усиления для P-контроллера в P-PI-контроллере.
Этот параметр отображается только в том случае, если для параметра Control type установлено значение P-PI control.
Integral anti-windup gain - Усиление защиты от навивки PI1 (по умолчанию) | положительный скалярКоэффициент усиления защиты от обмотки для PI-контроллера.
Этот параметр отображается только в том случае, если для параметра Control type установлено значение PI control или P-PI control.
Sample time (-1 for inherited) - Время блочной выборки-1 (по умолчанию) | положительный скалярВремя (в секундах) между последовательными выполнением блоков. Во время выполнения блок выдает выходные данные и, при необходимости, обновляет свое внутреннее состояние. Дополнительные сведения см. в разделе Что такое время образца? и Укажите время образца.
Если этот блок находится внутри запускаемой подсистемы, наследуйте время выборки, установив для этого параметра значение -1. Если этот блок находится в модели непрерывного шага переменной, укажите время выборки явно, используя положительный скаляр.
Этот параметр отображается только в том случае, если для параметра Control type установлено значение PI control или P-PI control.
Discretization sample time - Время выборки для дискретизации0.001 (по умолчанию) | положительный скалярВремя, в с, между последовательными дискретизациями. Для отмены нуля требуется дискретизация.
Этот параметр отображается только при выполнении всех следующих условий:
Для типа элемента управления установлено значение PI control или P-PI control.
Время выборки установлено в -1.
Включена отмена нуля.![]()
Enable zero cancellation - Обратная отмена нуляoff (по умолчанию) | onОпция для использования отмены нулевого значения на пути передачи.
Параметр Enable zero cancellation отображается только в том случае, если для параметра Control type установлено значение PI control или P-PI control.
Параметр Дискретизация времени выборки отображается только при выборе Включить отмену нуля.![]()
[1] Науар, М. У., А. А. Наассани, Э. Монмассон и И. Слама-Белходжа. «Контроллер прогнозируемого тока на основе FPGA для синхронного привода скорости машины». Транзакции IEEE по силовой электронике. Том 23, номер 4, 2008, стр. 2115-2126.



