Регулятор тока с внутренней широтно-импульсной модуляцией для машин с переключаемым сопротивлением
Управление Simscape/Electrical/Control/SRM
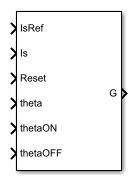
Контроллер тока SRM с блоком генерации PWM выполняет дискретное пропорционально-интегральное (PI) управление током для блока коммутируемой машины сопротивления (SRM). Блок включает в себя широтно-импульсную модуляцию (ШИМ).
На рисунке показана структура преобразователя для SRM.
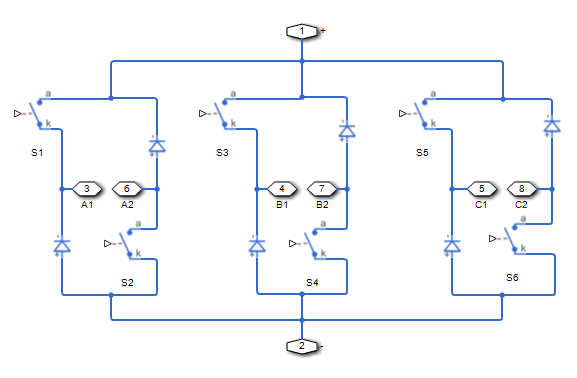
Как показано на рисунке, сигнал генерации ШИМ предназначен для устройств коммутации с высокой стороны.
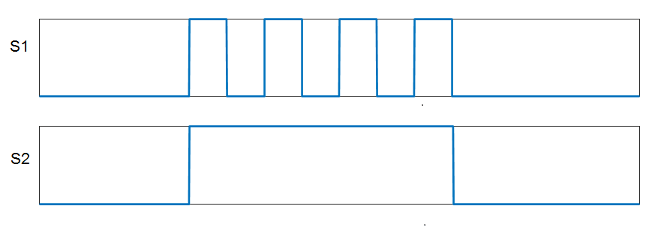
Когда управляющий сигнал больше значения счетчика несущей, ШИМ-генератор выводит 1. В противном случае он выводит 0.
Для определения рабочего цикла блок осуществляет управление током PI в системе отсчета ротора в соответствии с этим уравнением.
Is_ref−Is)
Где:
D - рабочий цикл.
Kp - пропорциональный коэффициент усиления.
Ki - интегральное усиление.
Ts - время выборки.
Is_ref - опорный ток.
Является измеренным током.
Для получения управляющих сигналов для трех фаз блок затем умножает рабочий цикл на сигналы коммутации. Полученные три управляющих сигнала нормализуются в интервале [0, 1].
[1] Саха, Н. и С. Панда. «Управление скоростью с уменьшением пульсации крутящего момента двигателя с переключаемым сопротивлением с помощью метода Hybrid Multy Optimizing Relacement Gravitational Search». Инженерная наука и техника. Том 20 (2017): 909-921.
Логика коммутации SRM | Контроллер тока SRM | Контроллер тока гистерезиса SRM | Машина с переключаемым сопротивлением

