Трехфазная катапультированная машина
Simscape/Электрические/Электромеханические/Нежелательные и шаговые
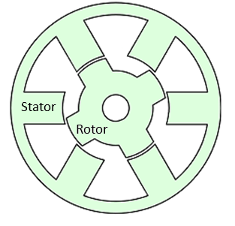
Блок Switched Discountance Machine представляет трехфазный Switched Hantance machine (SRM). Статор имеет три пары полюсов, несущих три обмотки двигателя, а ротор имеет несколько немагнитных полюсов. Электродвигатель создает крутящий момент, возбуждая пару полюсов статора, вызывая усилие на ближайших полюсах ротора и подтягивая их к выравниванию. На схеме показана конструкция двигателя.
Выберите этот компьютер в приложении, чтобы воспользоваться следующими свойствами:
Низкая стоимость
Относительно безопасные токи отказа
Устойчивость к работе при высоких температурах
Высокое отношение крутящего момента к инерции
Этот блок используется для моделирования SRM с использованием легко измеряемых или оцениваемых параметров. Чтобы смоделировать SRM с использованием данных КЭМ, см. раздел Параметризованный с помощью данных КЭМ электродвигатель коммутируемого сопротивления.
Угол хода ротора для трехфазной машины составляет
2.d3Nr,
где:
startst - угол стока.
Nr - число полюсов ротора.
Способность производства крутящего момента β одного полюса ротора равна
2.dNr.
Математическая модель для машины с переключаемым сопротивлением (SRM) является в высшей степени нелинейной из-за влияния магнитного насыщения на кривую связи потока с углом, λ (λ ph). Уравнение фазового напряжения для SRM
startph) dt
где:
vph - напряжение на фазу.
Rs - сопротивление статора на фазу.
iph - ток на фазу.
λ ph - связь потока на фазу.
δph - угол на фазу.
Переписывание уравнения фазового напряжения в терминах частных производных дает это уравнение:
Переходная индуктивность определяется как
∂iph,
или более просто как
Обратная электродвижущая сила определяется как
Подстановка этих терминов в переписанное уравнение напряжения дает это уравнение напряжения:
дифдт + Eph.
Применение формулы ко-энергии к уравнениям для крутящего момента,
∂θr,
и энергии,
) диф.
дает интегральное уравнение, которое определяет мгновенный крутящий момент на фазу, то есть
∂θphdiph.
Интегрирование по фазам дает это уравнение, которое определяет общий мгновенный крутящий момент для трехфазного SRM:
).
Уравнение движения:
− Bmλ
где:
J - инерция ротора.
λ - механическая скорость вращения.
T - крутящий момент ротора. Для блока машины с переключаемым сопротивлением крутящий момент течет от корпуса машины (консервационный порт C блока) к ротору машины (консервационный порт R блока).
TL - момент нагрузки.
J - инерция ротора.
Bm - демпфирование ротора.
Для моделирования высокой точности и разработки управления используйте эмпирические данные и расчет конечных элементов для определения кривой связи потока в терминах тока и угла, то есть
).
При моделировании с низкой точностью можно также аппроксимировать кривую с помощью аналитических методов. Одна из таких методик [2] использует эту экспоненциальную функцию:
iphf (startph)),
где:
λ sat - связь насыщенного потока.
f (startr) получают расширением Фурье.
Для расширения Фурье используйте первые два чётных члена этого уравнения:
Nrstartph)
где a > b,
Lmax2λ sat,
и
Lmin2λ sat.
Кривая связи потока аппроксимируется на основе параметрических и геометрических данных:
iph/λ sat),
где L0 - ненасыщенная индуктивность.
Эффекты насыщения более заметны, поскольку произведение тока и ненасыщенной индуктивности приближается к значению связи насыщенного потока. Задайте это значение с помощью параметра связи насыщенного потока.
Дифференцирование уравнения потока дает индуктивность обмотки:
(
Ненасыщенная индуктивность изменяется между минимальным и максимальным значениями. Минимальное значение возникает, когда полюс ротора находится непосредственно между двумя полюсами статора. Максимум возникает, когда полюс ротора совмещен с полюсом статора. Между этими двумя точками блок линейно аппроксимирует ненасыщенную индуктивность как функцию угла ротора. На этом рисунке показана ненасыщенная индуктивность при прохождении полюса ротора над полюсом статора.
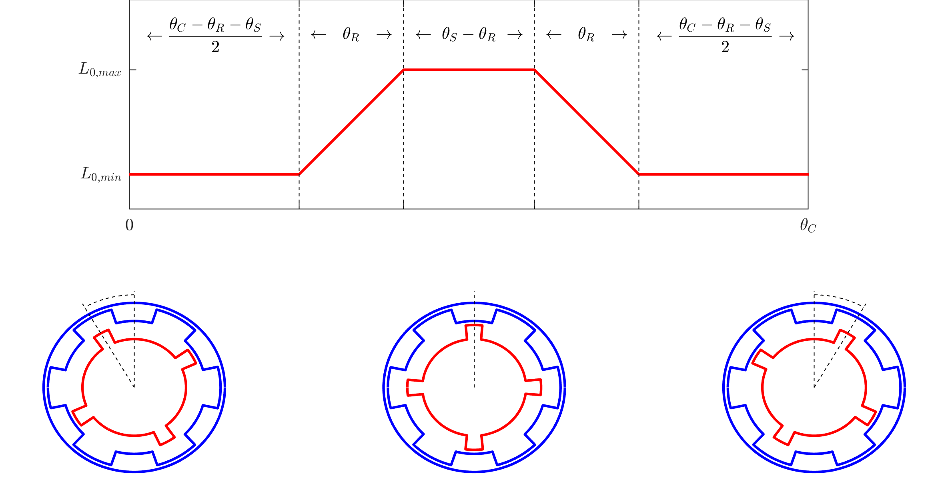
На рисунке:
δR соответствует углу, под которым находится полюс ротора. Задайте его с помощью параметра Угол (Angle), связанного с каждым полюсом ротора.
δS соответствует углу, которому подчинен полюс статора. Задайте его с помощью параметра Угол (Angle), связанного с каждым полюсом статора.
δ C соответствует углу, которому подчинен этот полный цикл, определяемый 2δ/2n, где n - число пар полюсов статора.
Блок предоставляет четыре варианта моделирования. Чтобы выбрать нужный вариант, щелкните правой кнопкой мыши блок в модели. В контекстном меню выберите «Simscape» > «Block choices», а затем один из следующих вариантов:
Composite three-phase ports | No thermal port - Блок содержит составные трехфазные электрические консервационные порты, связанные с обмотками статора, но не содержит тепловых портов. Этот вариант является вариантом по умолчанию.
Expanded three-phase ports | No thermal port - Блок содержит расширенные электрические консервационные порты, связанные с обмотками статора, но не содержит тепловые порты.
Composite three-phase ports | Show thermal port Блок содержит составные трехфазные электрические консервационные окна, связанные с обмотками статора, и четыре тепловых консервационных порта, по одному для каждой из трех обмоток и по одному для ротора.
Expanded three-phase ports | Show thermal port Блок содержит расширенные электрические консервационные отверстия, связанные с обмотками статора, и четыре теплосохранительных отверстия, по одному для каждой из трех обмоток и по одному для ротора.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
При выборе варианта теплового блока отображаются тепловые параметры.
На практике магнитные краевые эффекты предотвращают принятие индуктивностью трапециевидной формы при прохождении полюса ротора над полюсом статора. Чтобы смоделировать эти эффекты и избежать разрывов градиента, препятствующих сходимости решателя, блок сглаживает ∂L0/∂θ градиента в точках перегиба. Чтобы изменить угол, над которым применяется это сглаживание, используйте параметр Угол (Angle), над которым происходит сглаживание изменений градиента потока.
Блок предполагает, что нулевой угол ротора соответствует полюсу ротора, который полностью выровнен с α - фазой.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Болдея, И. и С. А. Насар. Электрические приводы, второе издание. Нью-Йорк: КПР, 2005.
[2] Илич '-Спонг, М., Р. Марино, С. Пересада и Д. Тейлор. «Управление линеаризацией обратной связи двигателей с переключаемым сопротивлением». Транзакции IEEE при автоматическом управлении. т. 32, № 5, 1987, с. 371-379.
BLDC | PMSM | Цепь поля синхронной машины | Измерение синхронной машины | Синхронная машина с нежелательной связью


