Вычислить конфигурации соединений для достижения положения «конец-эффектор»
Инструментарий робототехнической системы/Алгоритмы манипуляторов
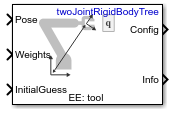
Блок «Обратная кинематика» (Inverse Kinematics) использует решатель обратной кинематики (IK) для вычисления конфигураций соединений для требуемой позы конечного эффектора на основе заданной модели дерева жесткого тела. Создайте модель дерева жесткого тела для робота с помощью rigidBodyTree класс. Модель дерева жесткого тела определяет все ограничения соединения, которые применяются решателем.
Укажите RigidBodyTree параметр и требуемый конечный эффектор внутри блочной маски. Параметры алгоритма также можно настроить на вкладке Параметры решателя (Solver Parameters).
Введите требуемый конечный эффектор Поза (Pose), Весы для допуска позы (Weights on pose tolerance) и InitityGuess для конфигурации соединения. Решатель выводит конфигурацию робота «Конфигурация» (Config), которая удовлетворяет позе конечного эффектора в пределах допусков, заданных на вкладке Параметры решателя (Solver Parameters).
[1] Бадреддин, Хасан, Стефан Вандевалле и Йохан Мейерс. «Последовательное квадратичное программирование (SQP) для оптимального управления при прямом численном моделировании турбулентного потока». Журнал вычислительной физики. 256 (2014): 1–16. doi: 10.1016/j.jcp.2013.08.044.
[2] Берцекас, Дмитрий П. Нелинейное программирование. Belmont, MA: Athena Scientific, 1999.
[3] Голдфарб, Дональд. «Расширение метода переменной метрики Давидона до максимизации при линейном неравенстве и ограничениях равенства». Журнал СИАМ по прикладной математике. т. 17, № 4 (1969): 739-64. дои: 10.1137/0117067.
[4] Нокедал, Хорхе и Стивен Райт. Численная оптимизация. Нью-Йорк, Нью-Йорк: Спрингер, 2006.
[5] Сугихара, Томомичи. «Разрешимость - бесконтрольная обратная кинематика методом Левенберга-Марквардта». Транзакции IEEE по робототехнике. т. 27, № 5 (2011): 984-91. дои: 10.1109/tro.2011.2148230.
[6] Чжао, Цзяньминь и Норман И. Бадлер. «Обратное кинематическое позиционирование с использованием нелинейного программирования для высокоартикулированных фигур». Транзакции ACM на графике. Том 13, № 4 (1994): 313-36. дои: 10,1145/ 195826,195827.

