Модель одноколесного транспортного средства
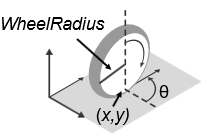
unicycleKinematics создает модель одноколесного транспортного средства для моделирования упрощенной автомобильной динамики транспортного средства. Состояние транспортного средства определяется как трехэлементный вектор [x y theta] с глобальной xy-позицией, заданной в метрах, и углом тета курса транспортного средства, заданным в радианах. Эта модель аппроксимирует одноколесное транспортное средство с заданным радиусом колеса, T.Radius, которое может вращаться на месте в соответствии с курсовым углом, theta. Чтобы вычислить состояния производной по времени для модели, используйте derivative функция с входными командами и текущим состоянием робота.
kinematicModel = unicycleKinematics
kinematicModel = unicycleKinematics(Name,Value)
derivative | Производная по времени от состояния транспортного средства |
Создание робота
Определите робота и задайте начальное начальное положение и ориентацию.
kinematicModel = unicycleKinematics; initialState = [0 0 0];
Моделирование движения робота
Установите временной интервал моделирования на 1 с с временными интервалами 0,05 с, а входные команды на 10 м/с и поворот влево. Моделирование движения робота с помощью ode45 решатель на derivative функция.
tspan = 0:0.05:1;
inputs = [10 1]; %Constant speed and turning left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Траектория графика
figure plot(y(:,1),y(:,2))

[1] Линч, Кевин М. и Фрэнк К. Парк. Современная робототехника: механика, планирование и управление 1-й ред. Кембридж, Массачусетс: Cambridge University Press, 2017.
